{"title":"Advanced design and fabrication of a medial linkage reciprocal orthosis for patients with spinal cord injury.","authors":"Fariba Fallah Cham Asmani, Mokhtar Arazpour, Mobina Khosravi, Zeinab Gasavi Nezhad, Mahdi Shafieian, Armen Adamian","doi":"10.1177/20556683251329789","DOIUrl":null,"url":null,"abstract":"<p><p><b>Background:</b> Individuals with spinal cord injuries (SCI) face substantial mobility challenges that affect their independence and quality of life. Traditional medial linkage reciprocal gait orthoses (MLRGO) often lack efficiency in enhancing mobility and stability. This study introduces the Advanced MLRGO, designed to overcome these limitations and improve walking function for SCI patients. <b>Material and methods:</b> The Advanced MLRGO was developed using orthopedic engineering and biomechanics principles, with detailed simulations performed in COMSOL Multi-physics to evaluate force distribution and resistance. A clinical trial involving five individuals with SCI was conducted to compare the performance of the Advanced MLRGO against the Prime-Walk orthosis and the standard MLRGO. <b>Results:</b> Results showed that the MLRGO system significantly improved walking speed (<i>p</i> = 0.03) and distance traveled (<i>p</i> = 0.04) compared to the Prime-Walk. The Advanced MLRGO also exhibited notable enhancements over the standard MLRGO, showing increased walking speed (<i>p</i> = 0.033) and distance (<i>p</i> = 0.026), as well as reduced donning time (<i>p</i> = 0.048). <b>Conclusion:</b> These findings indicate that the Advanced MLRGO significantly enhances mobility and independence for individuals with thoracic SCI. Future research should focus on improving doffing efficiency and assessing individual user experiences to maximize these benefits.</p>","PeriodicalId":43319,"journal":{"name":"Journal of Rehabilitation and Assistive Technologies Engineering","volume":"12 ","pages":"20556683251329789"},"PeriodicalIF":2.0000,"publicationDate":"2025-03-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11938489/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Rehabilitation and Assistive Technologies Engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1177/20556683251329789","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
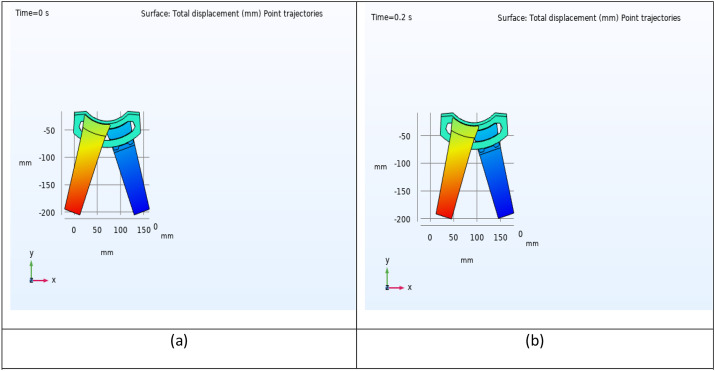
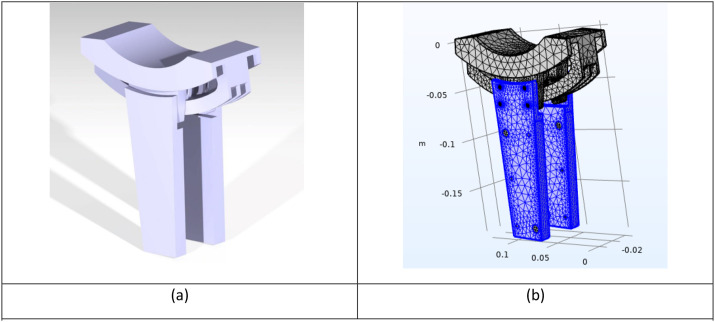
Background: Individuals with spinal cord injuries (SCI) face substantial mobility challenges that affect their independence and quality of life. Traditional medial linkage reciprocal gait orthoses (MLRGO) often lack efficiency in enhancing mobility and stability. This study introduces the Advanced MLRGO, designed to overcome these limitations and improve walking function for SCI patients. Material and methods: The Advanced MLRGO was developed using orthopedic engineering and biomechanics principles, with detailed simulations performed in COMSOL Multi-physics to evaluate force distribution and resistance. A clinical trial involving five individuals with SCI was conducted to compare the performance of the Advanced MLRGO against the Prime-Walk orthosis and the standard MLRGO. Results: Results showed that the MLRGO system significantly improved walking speed (p = 0.03) and distance traveled (p = 0.04) compared to the Prime-Walk. The Advanced MLRGO also exhibited notable enhancements over the standard MLRGO, showing increased walking speed (p = 0.033) and distance (p = 0.026), as well as reduced donning time (p = 0.048). Conclusion: These findings indicate that the Advanced MLRGO significantly enhances mobility and independence for individuals with thoracic SCI. Future research should focus on improving doffing efficiency and assessing individual user experiences to maximize these benefits.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
