{"title":"Evolving a neural olfactorimotor system in virtual and real olfactory environments.","authors":"Paul A Rhodes, Todd O Anderson","doi":"10.3389/fneng.2012.00022","DOIUrl":null,"url":null,"abstract":"<p><p>To provide a platform to enable the study of simulated olfactory circuitry in context, we have integrated a simulated neural olfactorimotor system with a virtual world which simulates both computational fluid dynamics as well as a robotic agent capable of exploring the simulated plumes. A number of the elements which we developed for this purpose have not, to our knowledge, been previously assembled into an integrated system, including: control of a simulated agent by a neural olfactorimotor system; continuous interaction between the simulated robot and the virtual plume; the inclusion of multiple distinct odorant plumes and background odor; the systematic use of artificial evolution driven by olfactorimotor performance (e.g., time to locate a plume source) to specify parameter values; the incorporation of the realities of an imperfect physical robot using a hybrid model where a physical robot encounters a simulated plume. We close by describing ongoing work toward engineering a high dimensional, reversible, low power electronic olfactory sensor which will allow olfactorimotor neural circuitry evolved in the virtual world to control an autonomous olfactory robot in the physical world. The platform described here is intended to better test theories of olfactory circuit function, as well as provide robust odor source localization in realistic environments.</p>","PeriodicalId":73093,"journal":{"name":"Frontiers in neuroengineering","volume":"5 ","pages":"22"},"PeriodicalIF":0.0000,"publicationDate":"2012-10-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.3389/fneng.2012.00022","citationCount":"4","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in neuroengineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/fneng.2012.00022","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2012/1/1 0:00:00","PubModel":"eCollection","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 4
Abstract
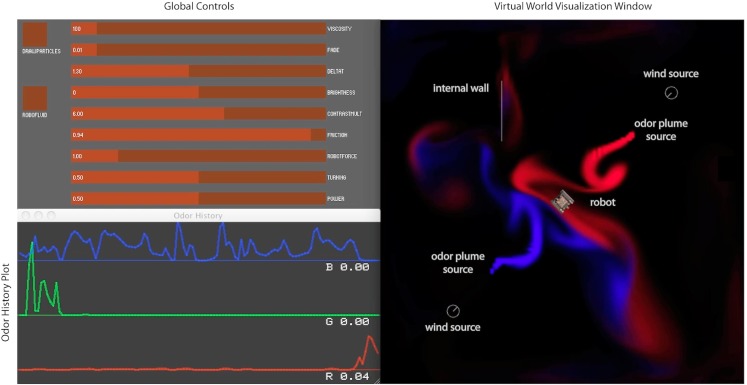
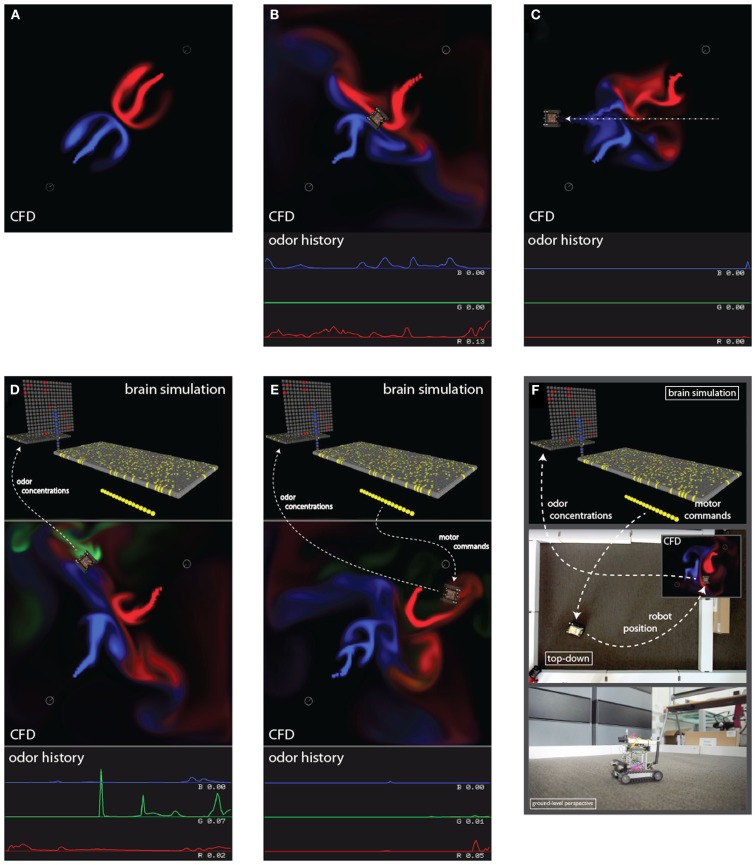
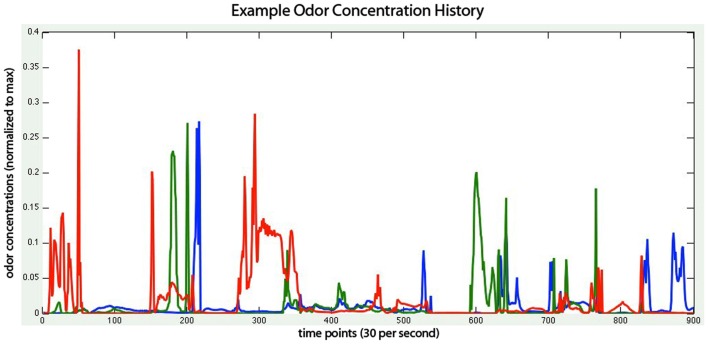
To provide a platform to enable the study of simulated olfactory circuitry in context, we have integrated a simulated neural olfactorimotor system with a virtual world which simulates both computational fluid dynamics as well as a robotic agent capable of exploring the simulated plumes. A number of the elements which we developed for this purpose have not, to our knowledge, been previously assembled into an integrated system, including: control of a simulated agent by a neural olfactorimotor system; continuous interaction between the simulated robot and the virtual plume; the inclusion of multiple distinct odorant plumes and background odor; the systematic use of artificial evolution driven by olfactorimotor performance (e.g., time to locate a plume source) to specify parameter values; the incorporation of the realities of an imperfect physical robot using a hybrid model where a physical robot encounters a simulated plume. We close by describing ongoing work toward engineering a high dimensional, reversible, low power electronic olfactory sensor which will allow olfactorimotor neural circuitry evolved in the virtual world to control an autonomous olfactory robot in the physical world. The platform described here is intended to better test theories of olfactory circuit function, as well as provide robust odor source localization in realistic environments.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
