{"title":"A New Hybrid Viscoelastic Soft Tissue Model based on Meshless Method for Haptic Surgical Simulation.","authors":"Yidong Bao, Dongmei Wu, Zhiyuan Yan, Zhijiang Du","doi":"10.2174/1874120701307010116","DOIUrl":null,"url":null,"abstract":"<p><p>This paper proposes a hybrid soft tissue model that consists of a multilayer structure and many spheres for surgical simulation system based on meshless. To improve accuracy of the model, tension is added to the three-parameter viscoelastic structure that connects the two spheres. By using haptic device, the three-parameter viscoelastic model (TPM) produces accurate deformationand also has better stress-strain, stress relaxation and creep properties. Stress relaxation and creep formulas have been obtained by mathematical formula derivation. Comparing with the experimental results of the real pig liver which were reported by Evren et al. and Amy et al., the curve lines of stress-strain, stress relaxation and creep of TPM are close to the experimental data of the real liver. Simulated results show that TPM has better real-time, stability and accuracy. </p>","PeriodicalId":39121,"journal":{"name":"Open Biomedical Engineering Journal","volume":"7 ","pages":"116-24"},"PeriodicalIF":0.0000,"publicationDate":"2013-11-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/f5/e6/TOBEJ-7-116.PMC3856390.pdf","citationCount":"17","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Open Biomedical Engineering Journal","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.2174/1874120701307010116","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2013/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"Medicine","Score":null,"Total":0}
引用次数: 17
Abstract
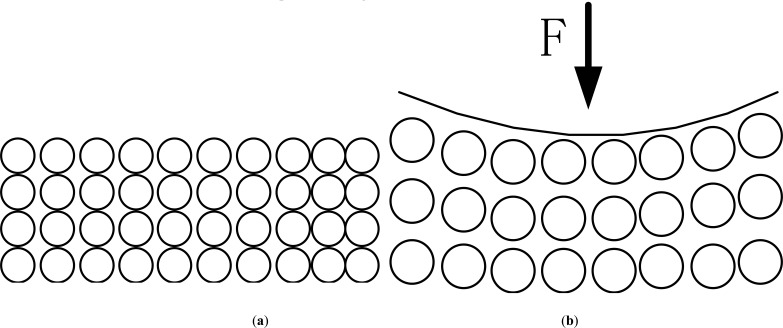
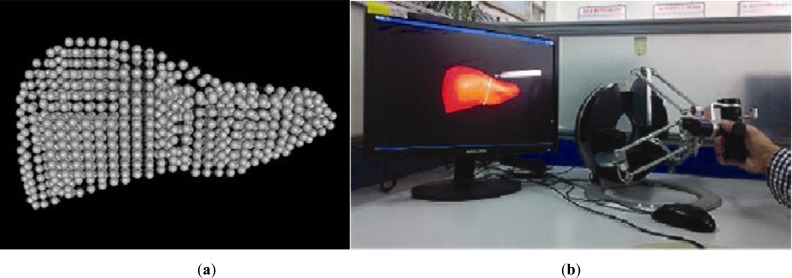
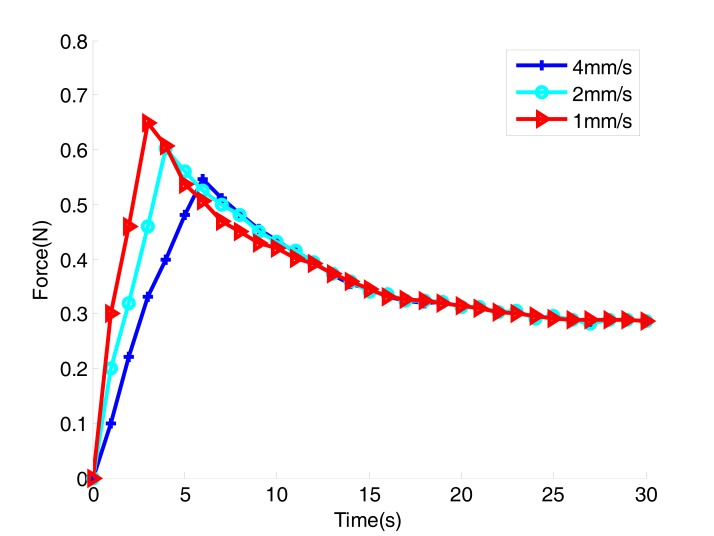
This paper proposes a hybrid soft tissue model that consists of a multilayer structure and many spheres for surgical simulation system based on meshless. To improve accuracy of the model, tension is added to the three-parameter viscoelastic structure that connects the two spheres. By using haptic device, the three-parameter viscoelastic model (TPM) produces accurate deformationand also has better stress-strain, stress relaxation and creep properties. Stress relaxation and creep formulas have been obtained by mathematical formula derivation. Comparing with the experimental results of the real pig liver which were reported by Evren et al. and Amy et al., the curve lines of stress-strain, stress relaxation and creep of TPM are close to the experimental data of the real liver. Simulated results show that TPM has better real-time, stability and accuracy.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
