{"title":"Parametrized topological complexity of poset-stratified spaces.","authors":"Kohei Tanaka","doi":"10.1007/s41468-021-00085-z","DOIUrl":null,"url":null,"abstract":"<p><p>In this paper, parametrized motion planning algorithms for a fiberwise space <math><mrow><mi>X</mi> <mo>→</mo> <mi>P</mi></mrow> </math> over a poset <i>P</i> are studied. Such an algorithm assigns paths in a space <i>X</i> decomposed into subspaces with the index set <i>P</i>, that do not cross the boundaries of the separated regions. We compute the parametrized topological complexity of <math><mrow><mi>X</mi> <mo>→</mo> <mi>P</mi></mrow> </math> , which is one less than the minimal number of local parametrized motion planning algorithms used for designing non-cross-border robot motions in <i>X</i>.</p>","PeriodicalId":73600,"journal":{"name":"Journal of applied and computational topology","volume":"6 2","pages":"221-246"},"PeriodicalIF":0.0000,"publicationDate":"2022-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8683837/pdf/","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of applied and computational topology","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s41468-021-00085-z","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2021/12/18 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 1
Abstract
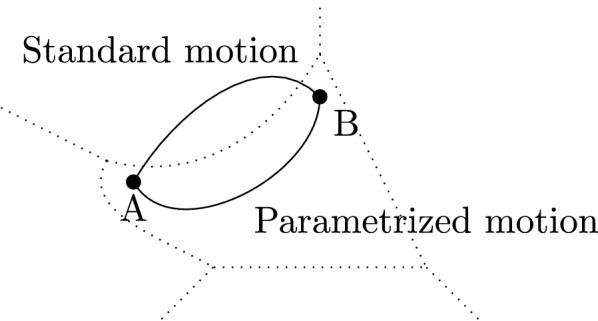
In this paper, parametrized motion planning algorithms for a fiberwise space over a poset P are studied. Such an algorithm assigns paths in a space X decomposed into subspaces with the index set P, that do not cross the boundaries of the separated regions. We compute the parametrized topological complexity of , which is one less than the minimal number of local parametrized motion planning algorithms used for designing non-cross-border robot motions in X.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
