Nooshin Jafari, Michael Lim, Aida Hassani, Jennifer Cordeiro, Crystal Kam, Kendall Ho
{"title":"Human-like tele-health robotics for older adults - A preliminary feasibility trial and vision.","authors":"Nooshin Jafari, Michael Lim, Aida Hassani, Jennifer Cordeiro, Crystal Kam, Kendall Ho","doi":"10.1177/20556683221140345","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>The global increase of the aging population presents major challenges to healthcare service delivery. Further, the COVID-19 pandemic exposed older adults' vulnerability to rapid deterioration of health when deprived of access to care due to the need for social distancing. Robotic technology advancements show promise to improve provision of quality care, support independence for patients and augment the capabilities of clinicians to perform tasks remotely.</p><p><strong>Aim: </strong>This study explored the feasibility and end-user acceptance of using a novel human-like tele-robotic system with touch feedback to conduct a remote medical examination and deliver safe care.</p><p><strong>Method: </strong>Testing of a remotely controlled robot was conducted with in-person clinician support to gather ECG readings of 11 healthy participants through a digital medical device. Post-study feedback about the system and the remote examinations conducted was obtained from study participants and study clinicians.</p><p><strong>Results: </strong>The findings demonstrated the system's capability to support remote examination of participants, and validated the system's perceived acceptability by clinicians and end-users who all reported feeling safe interacting with the robot and 72% preferred remote robotic exam over in-person examination.</p><p><strong>Conclusion: </strong>This paper discusses potential implications of robot-assisted telehealth for patients including older adults who are precluded from having in-person medical visits due to geographic distance or mobility, and proposes next steps for advancing robot-assisted telehealth delivery.</p>","PeriodicalId":43319,"journal":{"name":"Journal of Rehabilitation and Assistive Technologies Engineering","volume":" ","pages":"20556683221140345"},"PeriodicalIF":2.0000,"publicationDate":"2022-11-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC9666707/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Rehabilitation and Assistive Technologies Engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1177/20556683221140345","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: The global increase of the aging population presents major challenges to healthcare service delivery. Further, the COVID-19 pandemic exposed older adults' vulnerability to rapid deterioration of health when deprived of access to care due to the need for social distancing. Robotic technology advancements show promise to improve provision of quality care, support independence for patients and augment the capabilities of clinicians to perform tasks remotely.
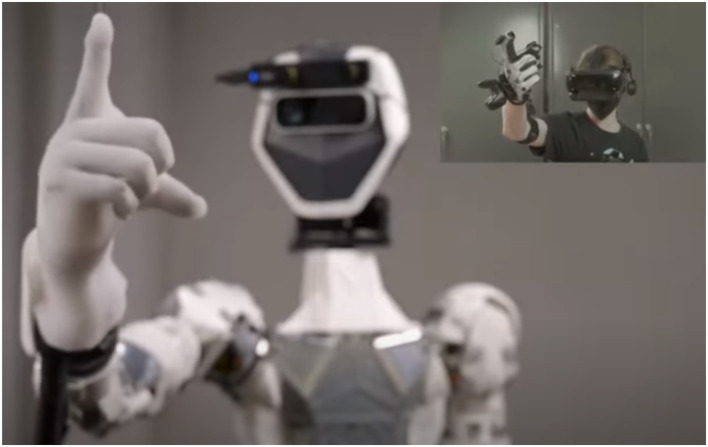
Aim: This study explored the feasibility and end-user acceptance of using a novel human-like tele-robotic system with touch feedback to conduct a remote medical examination and deliver safe care.
Method: Testing of a remotely controlled robot was conducted with in-person clinician support to gather ECG readings of 11 healthy participants through a digital medical device. Post-study feedback about the system and the remote examinations conducted was obtained from study participants and study clinicians.
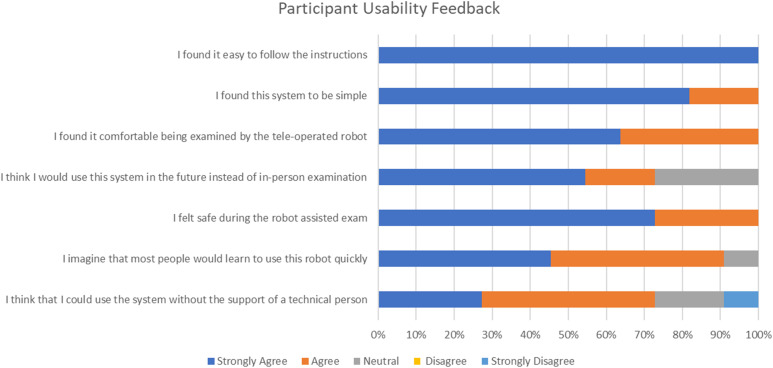
Results: The findings demonstrated the system's capability to support remote examination of participants, and validated the system's perceived acceptability by clinicians and end-users who all reported feeling safe interacting with the robot and 72% preferred remote robotic exam over in-person examination.
Conclusion: This paper discusses potential implications of robot-assisted telehealth for patients including older adults who are precluded from having in-person medical visits due to geographic distance or mobility, and proposes next steps for advancing robot-assisted telehealth delivery.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
