Alexis Thibodeau, Patrick Dumond, Joongho Kim, Edward D Lemaire
{"title":"Surrogate lower limb design for ankle-foot orthosis mechanical evaluation.","authors":"Alexis Thibodeau, Patrick Dumond, Joongho Kim, Edward D Lemaire","doi":"10.1177/20556683221139613","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose: </strong>This study designs and provides a pilot evaluation of a novel surrogate lower limb (SLL) that provides anatomically realistic three-dimensional (3D) foot motion, based on a literature consensus of passive lower limb motion. This SLL is intended to replace single axis surrogates currently used in mechanical testing of ankle-foot orthoses (AFO).</p><p><strong>Material and methods: </strong>The SLL design is inspired by the Rizzoli foot model, with shank, hindfoot, midfoot, forefoot, and toe sections. Ball and socket joints were used between hindfoot-midfoot (HM)-forefoot sections. Forefoot-toes used a hinge joint. Three-dimensional printed nylon, thermoplastic polyurethane (TPU) and polylactic acid (PLA), as well as casted silicone rubber were used to re-create foot components. After fabrication, motion capture was performed to measure rotation using fiducial markers. The SLL was then loaded under both static and cyclic loads representing a 100 kg person walking for 500,000 cycles.</p><p><strong>Results: </strong>Most joints were within 5° of target angles. The SLL survived static loads representing 1.5 times body weight for both static and cyclical loading.</p><p><strong>Conclusions: </strong>This SLL moved as designed and survived testing loads, warranting further investigation towards enabling essential mechanical testing for AFO currently on the market, and helping to guide device prescription.</p>","PeriodicalId":2,"journal":{"name":"ACS Applied Bio Materials","volume":" ","pages":"20556683221139613"},"PeriodicalIF":4.7000,"publicationDate":"2022-11-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/54/c2/10.1177_20556683221139613.PMC9693806.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"ACS Applied Bio Materials","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1177/20556683221139613","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"MATERIALS SCIENCE, BIOMATERIALS","Score":null,"Total":0}
引用次数: 0
Abstract
Purpose: This study designs and provides a pilot evaluation of a novel surrogate lower limb (SLL) that provides anatomically realistic three-dimensional (3D) foot motion, based on a literature consensus of passive lower limb motion. This SLL is intended to replace single axis surrogates currently used in mechanical testing of ankle-foot orthoses (AFO).
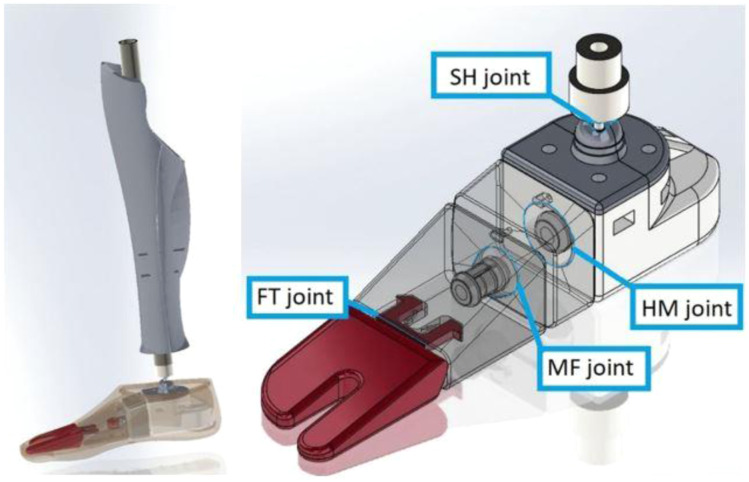
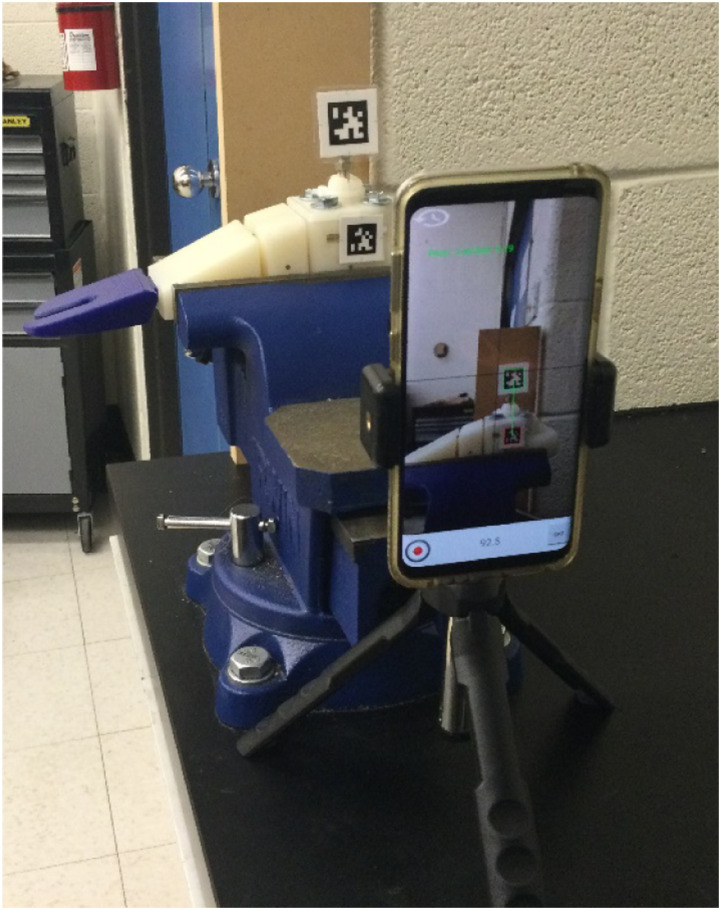
Material and methods: The SLL design is inspired by the Rizzoli foot model, with shank, hindfoot, midfoot, forefoot, and toe sections. Ball and socket joints were used between hindfoot-midfoot (HM)-forefoot sections. Forefoot-toes used a hinge joint. Three-dimensional printed nylon, thermoplastic polyurethane (TPU) and polylactic acid (PLA), as well as casted silicone rubber were used to re-create foot components. After fabrication, motion capture was performed to measure rotation using fiducial markers. The SLL was then loaded under both static and cyclic loads representing a 100 kg person walking for 500,000 cycles.
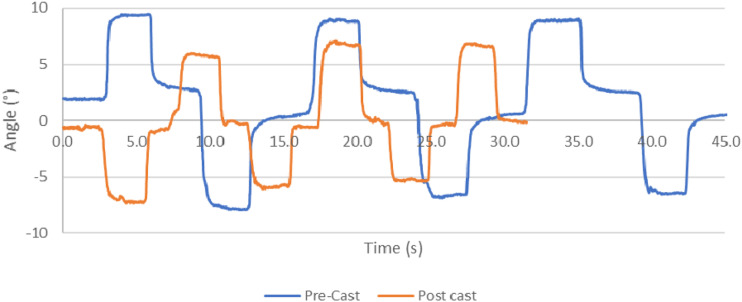
Results: Most joints were within 5° of target angles. The SLL survived static loads representing 1.5 times body weight for both static and cyclical loading.
Conclusions: This SLL moved as designed and survived testing loads, warranting further investigation towards enabling essential mechanical testing for AFO currently on the market, and helping to guide device prescription.
期刊介绍:
ACS Applied Bio Materials is an interdisciplinary journal publishing original research covering all aspects of biomaterials and biointerfaces including and beyond the traditional biosensing, biomedical and therapeutic applications.
The journal is devoted to reports of new and original experimental and theoretical research of an applied nature that integrates knowledge in the areas of materials, engineering, physics, bioscience, and chemistry into important bio applications. The journal is specifically interested in work that addresses the relationship between structure and function and assesses the stability and degradation of materials under relevant environmental and biological conditions.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
