Peng Sun, Yunpeng Wang, Peng He, Xinxin Pei, Mengmeng Yang, Kun Jiang, Diange Yang
{"title":"GCD-L: A Novel Method for Geometric Change Detection in HD Maps Using Low-Cost Sensors","authors":"Peng Sun, Yunpeng Wang, Peng He, Xinxin Pei, Mengmeng Yang, Kun Jiang, Diange Yang","doi":"10.1007/s42154-022-00188-y","DOIUrl":null,"url":null,"abstract":"<div><p>Updating high-definition maps is imperative for the safety of autonomous vehicles. However, positional changes in lane lines are hard to be detected in a timely manner due to a limited number of expensive surveying vehicles over a large geographic area. Herein, a novel method is proposed to detect the geometric changes of lane lines using low-cost sensors, such as consumer-grade global navigation satellite system (GNSS) hardware receivers and cameras. The proposed framework geometric change detection using low-cost sensors (GCD-L) and algorithm change segment compare (CSC), which are based on the lane width between the curb line and the adjacent leftmost lane line, can perceive the positional changes of the leftmost lane line on highway and expressway roads. The effectiveness of the proposed method is verified by evaluating it on a real-world typical urban ring road dataset. The experimental results show that 71% detected change segments are valid with only two round crowdsourced maps.</p></div>","PeriodicalId":36310,"journal":{"name":"Automotive Innovation","volume":"5 3","pages":"324 - 332"},"PeriodicalIF":5.0000,"publicationDate":"2022-07-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Automotive Innovation","FirstCategoryId":"1087","ListUrlMain":"https://link.springer.com/article/10.1007/s42154-022-00188-y","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 2
Abstract
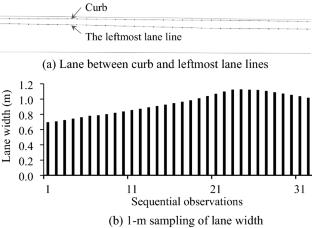
Updating high-definition maps is imperative for the safety of autonomous vehicles. However, positional changes in lane lines are hard to be detected in a timely manner due to a limited number of expensive surveying vehicles over a large geographic area. Herein, a novel method is proposed to detect the geometric changes of lane lines using low-cost sensors, such as consumer-grade global navigation satellite system (GNSS) hardware receivers and cameras. The proposed framework geometric change detection using low-cost sensors (GCD-L) and algorithm change segment compare (CSC), which are based on the lane width between the curb line and the adjacent leftmost lane line, can perceive the positional changes of the leftmost lane line on highway and expressway roads. The effectiveness of the proposed method is verified by evaluating it on a real-world typical urban ring road dataset. The experimental results show that 71% detected change segments are valid with only two round crowdsourced maps.
期刊介绍:
Automotive Innovation is dedicated to the publication of innovative findings in the automotive field as well as other related disciplines, covering the principles, methodologies, theoretical studies, experimental studies, product engineering and engineering application. The main topics include but are not limited to: energy-saving, electrification, intelligent and connected, new energy vehicle, safety and lightweight technologies. The journal presents the latest trend and advances of automotive technology.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
