Ye Gong, Pengwei Zhou, Yu‐ye Liu, Haonan Dong, Li Li, Jian Yao
{"title":"View‐graph key‐subset extraction for efficient and robust structure from motion","authors":"Ye Gong, Pengwei Zhou, Yu‐ye Liu, Haonan Dong, Li Li, Jian Yao","doi":"10.1111/phor.12451","DOIUrl":null,"url":null,"abstract":"Structure from motion (SfM) is used to recover camera poses and the sparse structure of real scenes from multiview images. SfM methods construct a view‐graph from the matching relationships of images. Redundancy and incorrect edges are usually observed in it. Redundancy inhibits the efficiency and incorrect edges result in the misalignment of structures. In addition, the uneven distribution of vertices usually affects the global accuracy. To address these problems, we propose a coarse‐to‐fine approach in which the poses of an extracted key‐subset of images are first computed and then all remaining images are oriented. The core of this approach is view‐graph key‐subset extraction, which not only prunes redundant data and incorrect edges but also obtains properly distributed key‐subset vertices. The extraction approach is based on a replaceability score and an iteration‐update strategy. In this way, only vertices with high SfM importance are preserved in the key‐subset. Different public datasets are used to evaluate our approach. Due to the absence of ground‐truth camera poses in large‐scale datasets, we present new datasets with accurate camera poses and point clouds. The results demonstrate that our approach greatly increases the efficiency of SfM. Furthermore, the robustness and accuracy can be improved.","PeriodicalId":22881,"journal":{"name":"The Photogrammetric Record","volume":"41 1","pages":"252 - 296"},"PeriodicalIF":0.0000,"publicationDate":"2023-06-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"The Photogrammetric Record","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1111/phor.12451","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
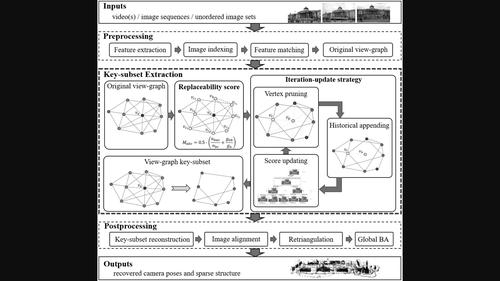
Structure from motion (SfM) is used to recover camera poses and the sparse structure of real scenes from multiview images. SfM methods construct a view‐graph from the matching relationships of images. Redundancy and incorrect edges are usually observed in it. Redundancy inhibits the efficiency and incorrect edges result in the misalignment of structures. In addition, the uneven distribution of vertices usually affects the global accuracy. To address these problems, we propose a coarse‐to‐fine approach in which the poses of an extracted key‐subset of images are first computed and then all remaining images are oriented. The core of this approach is view‐graph key‐subset extraction, which not only prunes redundant data and incorrect edges but also obtains properly distributed key‐subset vertices. The extraction approach is based on a replaceability score and an iteration‐update strategy. In this way, only vertices with high SfM importance are preserved in the key‐subset. Different public datasets are used to evaluate our approach. Due to the absence of ground‐truth camera poses in large‐scale datasets, we present new datasets with accurate camera poses and point clouds. The results demonstrate that our approach greatly increases the efficiency of SfM. Furthermore, the robustness and accuracy can be improved.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
