Sei-Ichi Sakamoto, Yonatan Hutabarat, Dai Owaki, Mitsuhiro Hayashibe
{"title":"Ground Reaction Force and Moment Estimation through EMG Sensing Using Long Short-Term Memory Network during Posture Coordination.","authors":"Sei-Ichi Sakamoto, Yonatan Hutabarat, Dai Owaki, Mitsuhiro Hayashibe","doi":"10.34133/cbsystems.0016","DOIUrl":null,"url":null,"abstract":"<p><p>Motion prediction based on kinematic information such as body segment displacement and joint angle has been widely studied. Because motions originate from forces, it is beneficial to estimate dynamic information, such as the ground reaction force (GRF), in addition to kinematic information for advanced motion prediction. In this study, we proposed a method to estimate GRF and ground reaction moment (GRM) from electromyography (EMG) in combination with and without an inertial measurement unit (IMU) sensor using a machine learning technique. A long short-term memory network, which is suitable for processing long time-span data, was constructed with EMG and IMU as input data to estimate GRF during posture control and stepping motion. The results demonstrate that the proposed method can provide the GRF estimation with a root mean square error (RMSE) of 8.22 ± 0.97% (mean ± SE) for the posture control motion and 11.17 ± 2.16% (mean ± SE) for the stepping motion. We could confirm that EMG input is essential especially when we need to predict both GRF and GRM with limited numbers of sensors attached under knees. In addition, we developed a GRF visualization system integrated with ongoing motion in a Unity environment. This system enabled the visualization of the GRF vector in 3-dimensional space and provides predictive motion direction based on the estimated GRF, which can be useful for human motion prediction with portable sensors.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0016"},"PeriodicalIF":18.1000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10044327/pdf/","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0016","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 2
Abstract
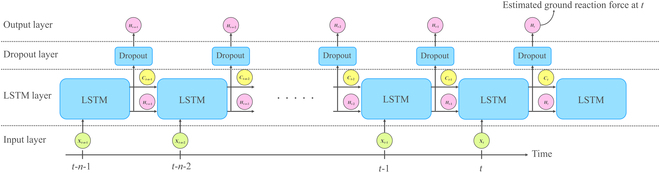
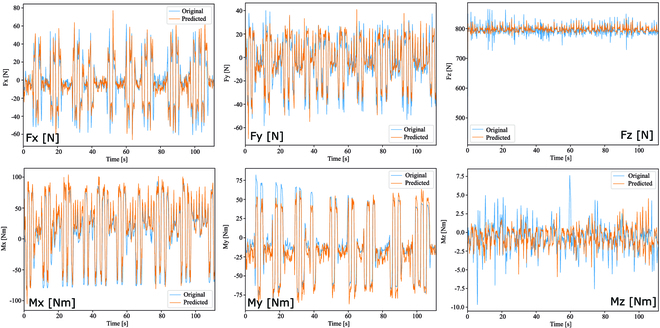
Motion prediction based on kinematic information such as body segment displacement and joint angle has been widely studied. Because motions originate from forces, it is beneficial to estimate dynamic information, such as the ground reaction force (GRF), in addition to kinematic information for advanced motion prediction. In this study, we proposed a method to estimate GRF and ground reaction moment (GRM) from electromyography (EMG) in combination with and without an inertial measurement unit (IMU) sensor using a machine learning technique. A long short-term memory network, which is suitable for processing long time-span data, was constructed with EMG and IMU as input data to estimate GRF during posture control and stepping motion. The results demonstrate that the proposed method can provide the GRF estimation with a root mean square error (RMSE) of 8.22 ± 0.97% (mean ± SE) for the posture control motion and 11.17 ± 2.16% (mean ± SE) for the stepping motion. We could confirm that EMG input is essential especially when we need to predict both GRF and GRM with limited numbers of sensors attached under knees. In addition, we developed a GRF visualization system integrated with ongoing motion in a Unity environment. This system enabled the visualization of the GRF vector in 3-dimensional space and provides predictive motion direction based on the estimated GRF, which can be useful for human motion prediction with portable sensors.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
