Zhe Chen, Qian Liang, Zihou Wei, Xie Chen, Qing Shi, Zhiqiang Yu, Tao Sun
{"title":"An Overview of In Vitro Biological Neural Networks for Robot Intelligence.","authors":"Zhe Chen, Qian Liang, Zihou Wei, Xie Chen, Qing Shi, Zhiqiang Yu, Tao Sun","doi":"10.34133/cbsystems.0001","DOIUrl":null,"url":null,"abstract":"<p><p>In vitro biological neural networks (BNNs) interconnected with robots, so-called BNN-based neurorobotic systems, can interact with the external world, so that they can present some preliminary intelligent behaviors, including learning, memory, robot control, etc. This work aims to provide a comprehensive overview of the intelligent behaviors presented by the BNN-based neurorobotic systems, with a particular focus on those related to robot intelligence. In this work, we first introduce the necessary biological background to understand the 2 characteristics of the BNNs: nonlinear computing capacity and network plasticity. Then, we describe the typical architecture of the BNN-based neurorobotic systems and outline the mainstream techniques to realize such an architecture from 2 aspects: from robots to BNNs and from BNNs to robots. Next, we separate the intelligent behaviors into 2 parts according to whether they rely solely on the computing capacity (computing capacity-dependent) or depend also on the network plasticity (network plasticity-dependent), which are then expounded respectively, with a focus on those related to the realization of robot intelligence. Finally, the development trends and challenges of the BNN-based neurorobotic systems are discussed.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0001"},"PeriodicalIF":18.1000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10076061/pdf/","citationCount":"7","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0001","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 7
Abstract
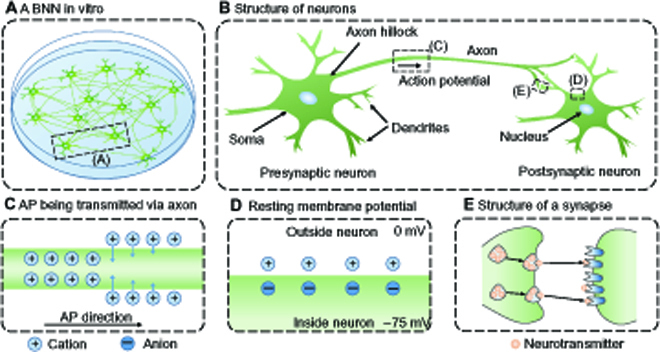
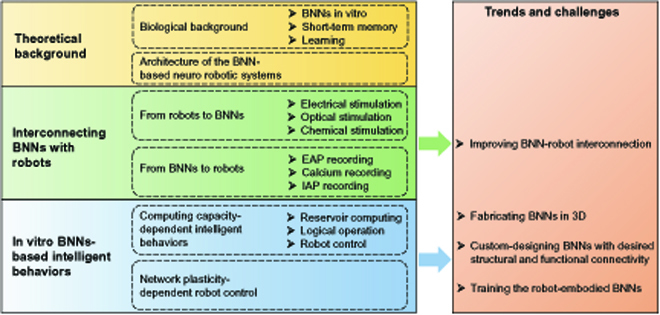
In vitro biological neural networks (BNNs) interconnected with robots, so-called BNN-based neurorobotic systems, can interact with the external world, so that they can present some preliminary intelligent behaviors, including learning, memory, robot control, etc. This work aims to provide a comprehensive overview of the intelligent behaviors presented by the BNN-based neurorobotic systems, with a particular focus on those related to robot intelligence. In this work, we first introduce the necessary biological background to understand the 2 characteristics of the BNNs: nonlinear computing capacity and network plasticity. Then, we describe the typical architecture of the BNN-based neurorobotic systems and outline the mainstream techniques to realize such an architecture from 2 aspects: from robots to BNNs and from BNNs to robots. Next, we separate the intelligent behaviors into 2 parts according to whether they rely solely on the computing capacity (computing capacity-dependent) or depend also on the network plasticity (network plasticity-dependent), which are then expounded respectively, with a focus on those related to the realization of robot intelligence. Finally, the development trends and challenges of the BNN-based neurorobotic systems are discussed.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
