Hongzhao Xie, Zihang Gao, Guanglu Jia, Shingo Shimoda, Qing Shi
{"title":"用小型机器老鼠学习老鼠的行为互动。","authors":"Hongzhao Xie, Zihang Gao, Guanglu Jia, Shingo Shimoda, Qing Shi","doi":"10.34133/cbsystems.0032","DOIUrl":null,"url":null,"abstract":"<p><p>In this paper, we propose a novel method for emulating rat-like behavioral interactions in robots using reinforcement learning. Specifically, we develop a state decision method to optimize the interaction process among 6 known behavior types that have been identified in previous research on rat interactions. The novelty of our method lies in using the temporal difference (TD) algorithm to optimize the state decision process, which enables the robots to make informed decisions about their behavior choices. To assess the similarity between robot and rat behavior, we use Pearson correlation. We then use TD-<i>λ</i> to update the state value function and make state decisions based on probability. The robots execute these decisions using our dynamics-based controller. Our results demonstrate that our method can generate rat-like behaviors on both short- and long-term timescales, with interaction information entropy comparable to that between real rats. Overall, our approach shows promise for controlling robots in robot-rat interactions and highlights the potential of using reinforcement learning to develop more sophisticated robotic systems.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0032"},"PeriodicalIF":18.1000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10278959/pdf/","citationCount":"0","resultStr":"{\"title\":\"Learning Rat-Like Behavioral Interaction Using a Small-Scale Robotic Rat.\",\"authors\":\"Hongzhao Xie, Zihang Gao, Guanglu Jia, Shingo Shimoda, Qing Shi\",\"doi\":\"10.34133/cbsystems.0032\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>In this paper, we propose a novel method for emulating rat-like behavioral interactions in robots using reinforcement learning. Specifically, we develop a state decision method to optimize the interaction process among 6 known behavior types that have been identified in previous research on rat interactions. The novelty of our method lies in using the temporal difference (TD) algorithm to optimize the state decision process, which enables the robots to make informed decisions about their behavior choices. To assess the similarity between robot and rat behavior, we use Pearson correlation. We then use TD-<i>λ</i> to update the state value function and make state decisions based on probability. The robots execute these decisions using our dynamics-based controller. Our results demonstrate that our method can generate rat-like behaviors on both short- and long-term timescales, with interaction information entropy comparable to that between real rats. Overall, our approach shows promise for controlling robots in robot-rat interactions and highlights the potential of using reinforcement learning to develop more sophisticated robotic systems.</p>\",\"PeriodicalId\":72764,\"journal\":{\"name\":\"Cyborg and bionic systems (Washington, D.C.)\",\"volume\":\"4 \",\"pages\":\"0032\"},\"PeriodicalIF\":18.1000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10278959/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cyborg and bionic systems (Washington, D.C.)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.34133/cbsystems.0032\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0032","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Learning Rat-Like Behavioral Interaction Using a Small-Scale Robotic Rat.
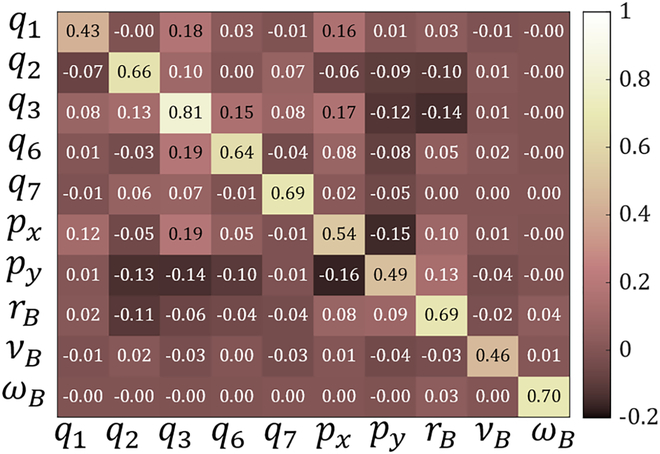
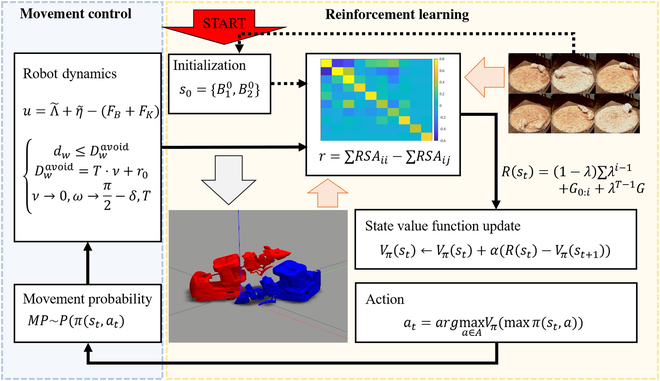
In this paper, we propose a novel method for emulating rat-like behavioral interactions in robots using reinforcement learning. Specifically, we develop a state decision method to optimize the interaction process among 6 known behavior types that have been identified in previous research on rat interactions. The novelty of our method lies in using the temporal difference (TD) algorithm to optimize the state decision process, which enables the robots to make informed decisions about their behavior choices. To assess the similarity between robot and rat behavior, we use Pearson correlation. We then use TD-λ to update the state value function and make state decisions based on probability. The robots execute these decisions using our dynamics-based controller. Our results demonstrate that our method can generate rat-like behaviors on both short- and long-term timescales, with interaction information entropy comparable to that between real rats. Overall, our approach shows promise for controlling robots in robot-rat interactions and highlights the potential of using reinforcement learning to develop more sophisticated robotic systems.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
