{"title":"基于最佳伙伴相似性的实用跟踪方法。","authors":"Haiyu He, Zhen Chen, Haikuo Liu, Xiangdong Liu, Youguang Guo, Jian Li","doi":"10.34133/cbsystems.0050","DOIUrl":null,"url":null,"abstract":"<p><p>Visual tracking is a crucial skill for bionic robots to perceive the environment and control their movement. However, visual tracking is challenging when the target undergoes nonrigid deformation because of the perspective change from the camera mounted on the robot. In this paper, a real-time and scale-adaptive visual tracking method based on best buddies similarity (BBS) is presented, which is a state-of-the-art template matching method that can handle nonrigid deformation. The proposed method improves the original BBS in 4 aspects: (a) The caching scheme is optimized to reduce the computational overhead, (b) the effect of cluttered backgrounds on BBS is theoretically analyzed and a patch-based texture is introduced to enhance the robustness and accuracy, (c) the batch gradient descent algorithm is used to further speed up the method, and (d) a resample strategy is applied to enable the BBS to track the target in scale space. The proposed method on challenging real-world datasets is evaluated and its promising performance is demonstrated.</p>","PeriodicalId":72764,"journal":{"name":"Cyborg and bionic systems (Washington, D.C.)","volume":"4 ","pages":"0050"},"PeriodicalIF":10.5000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10465019/pdf/","citationCount":"0","resultStr":"{\"title\":\"Practical Tracking Method based on Best Buddies Similarity.\",\"authors\":\"Haiyu He, Zhen Chen, Haikuo Liu, Xiangdong Liu, Youguang Guo, Jian Li\",\"doi\":\"10.34133/cbsystems.0050\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Visual tracking is a crucial skill for bionic robots to perceive the environment and control their movement. However, visual tracking is challenging when the target undergoes nonrigid deformation because of the perspective change from the camera mounted on the robot. In this paper, a real-time and scale-adaptive visual tracking method based on best buddies similarity (BBS) is presented, which is a state-of-the-art template matching method that can handle nonrigid deformation. The proposed method improves the original BBS in 4 aspects: (a) The caching scheme is optimized to reduce the computational overhead, (b) the effect of cluttered backgrounds on BBS is theoretically analyzed and a patch-based texture is introduced to enhance the robustness and accuracy, (c) the batch gradient descent algorithm is used to further speed up the method, and (d) a resample strategy is applied to enable the BBS to track the target in scale space. The proposed method on challenging real-world datasets is evaluated and its promising performance is demonstrated.</p>\",\"PeriodicalId\":72764,\"journal\":{\"name\":\"Cyborg and bionic systems (Washington, D.C.)\",\"volume\":\"4 \",\"pages\":\"0050\"},\"PeriodicalIF\":10.5000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10465019/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cyborg and bionic systems (Washington, D.C.)\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.34133/cbsystems.0050\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cyborg and bionic systems (Washington, D.C.)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.34133/cbsystems.0050","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Practical Tracking Method based on Best Buddies Similarity.
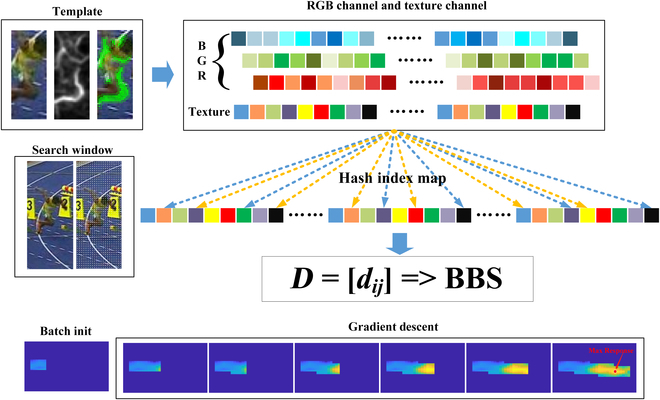
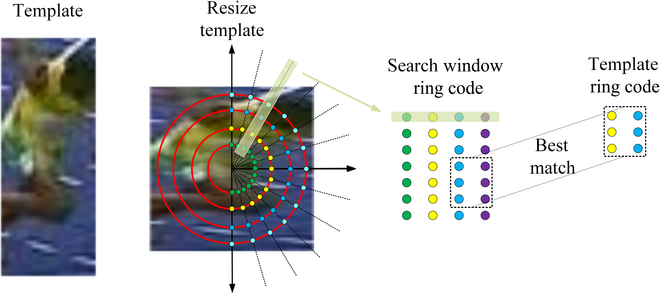
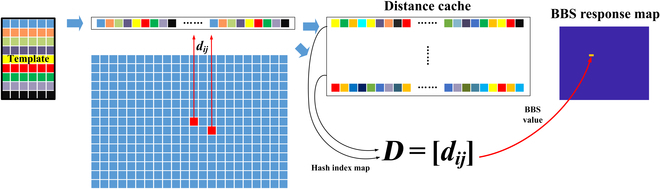
Visual tracking is a crucial skill for bionic robots to perceive the environment and control their movement. However, visual tracking is challenging when the target undergoes nonrigid deformation because of the perspective change from the camera mounted on the robot. In this paper, a real-time and scale-adaptive visual tracking method based on best buddies similarity (BBS) is presented, which is a state-of-the-art template matching method that can handle nonrigid deformation. The proposed method improves the original BBS in 4 aspects: (a) The caching scheme is optimized to reduce the computational overhead, (b) the effect of cluttered backgrounds on BBS is theoretically analyzed and a patch-based texture is introduced to enhance the robustness and accuracy, (c) the batch gradient descent algorithm is used to further speed up the method, and (d) a resample strategy is applied to enable the BBS to track the target in scale space. The proposed method on challenging real-world datasets is evaluated and its promising performance is demonstrated.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
