{"title":"RFDANet:一种基于多层关注的CNN和LSTM网络的FMCW和TOF雷达融合的驾驶员活动识别方法","authors":"Minming Gu, Kaiyu Chen, Zhixiang Chen","doi":"10.1007/s40747-023-01236-8","DOIUrl":null,"url":null,"abstract":"Abstract Dangerous driving behavior is a major contributing factor to road traffic accidents. Identifying and intervening in drivers’ unsafe driving behaviors is thus crucial for preventing accidents and ensuring road safety. However, many of the existing methods for monitoring drivers’ behaviors rely on computer vision technology, which has the potential to invade privacy. This paper proposes a radar-based deep learning method to analyze driver behavior. The method utilizes FMCW radar along with TOF radar to identify five types of driving behavior: normal driving, head up, head twisting, picking up the phone, and dancing to music. The proposed model, called RFDANet, includes two parallel forward propagation channels that are relatively independent of each other. The range-Doppler information from the FMCW radar and the position information from the TOF radar are used as inputs. After feature extraction by CNN, an attention mechanism is introduced into the deep architecture of the branch layer to adjust the weight of different branches. To further recognize driving behavior, LSTM is used. The effectiveness of the proposed method is verified by actual driving data. The results indicate that the average accuracy of each of the five types of driving behavior is 94.5%, which shows the advantage of using the proposed deep learning method. Overall, the experimental results confirm that the proposed method is highly effective for detecting drivers’ behavior.","PeriodicalId":10524,"journal":{"name":"Complex & Intelligent Systems","volume":"42 1","pages":"0"},"PeriodicalIF":4.6000,"publicationDate":"2023-09-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"RFDANet: an FMCW and TOF radar fusion approach for driver activity recognition using multi-level attention based CNN and LSTM network\",\"authors\":\"Minming Gu, Kaiyu Chen, Zhixiang Chen\",\"doi\":\"10.1007/s40747-023-01236-8\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Abstract Dangerous driving behavior is a major contributing factor to road traffic accidents. Identifying and intervening in drivers’ unsafe driving behaviors is thus crucial for preventing accidents and ensuring road safety. However, many of the existing methods for monitoring drivers’ behaviors rely on computer vision technology, which has the potential to invade privacy. This paper proposes a radar-based deep learning method to analyze driver behavior. The method utilizes FMCW radar along with TOF radar to identify five types of driving behavior: normal driving, head up, head twisting, picking up the phone, and dancing to music. The proposed model, called RFDANet, includes two parallel forward propagation channels that are relatively independent of each other. The range-Doppler information from the FMCW radar and the position information from the TOF radar are used as inputs. After feature extraction by CNN, an attention mechanism is introduced into the deep architecture of the branch layer to adjust the weight of different branches. To further recognize driving behavior, LSTM is used. The effectiveness of the proposed method is verified by actual driving data. The results indicate that the average accuracy of each of the five types of driving behavior is 94.5%, which shows the advantage of using the proposed deep learning method. Overall, the experimental results confirm that the proposed method is highly effective for detecting drivers’ behavior.\",\"PeriodicalId\":10524,\"journal\":{\"name\":\"Complex & Intelligent Systems\",\"volume\":\"42 1\",\"pages\":\"0\"},\"PeriodicalIF\":4.6000,\"publicationDate\":\"2023-09-26\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Complex & Intelligent Systems\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s40747-023-01236-8\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Complex & Intelligent Systems","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s40747-023-01236-8","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
RFDANet: an FMCW and TOF radar fusion approach for driver activity recognition using multi-level attention based CNN and LSTM network
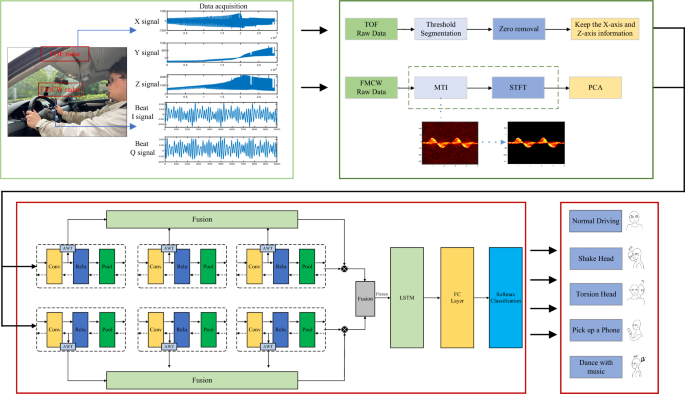
Abstract Dangerous driving behavior is a major contributing factor to road traffic accidents. Identifying and intervening in drivers’ unsafe driving behaviors is thus crucial for preventing accidents and ensuring road safety. However, many of the existing methods for monitoring drivers’ behaviors rely on computer vision technology, which has the potential to invade privacy. This paper proposes a radar-based deep learning method to analyze driver behavior. The method utilizes FMCW radar along with TOF radar to identify five types of driving behavior: normal driving, head up, head twisting, picking up the phone, and dancing to music. The proposed model, called RFDANet, includes two parallel forward propagation channels that are relatively independent of each other. The range-Doppler information from the FMCW radar and the position information from the TOF radar are used as inputs. After feature extraction by CNN, an attention mechanism is introduced into the deep architecture of the branch layer to adjust the weight of different branches. To further recognize driving behavior, LSTM is used. The effectiveness of the proposed method is verified by actual driving data. The results indicate that the average accuracy of each of the five types of driving behavior is 94.5%, which shows the advantage of using the proposed deep learning method. Overall, the experimental results confirm that the proposed method is highly effective for detecting drivers’ behavior.
期刊介绍:
Complex & Intelligent Systems aims to provide a forum for presenting and discussing novel approaches, tools and techniques meant for attaining a cross-fertilization between the broad fields of complex systems, computational simulation, and intelligent analytics and visualization. The transdisciplinary research that the journal focuses on will expand the boundaries of our understanding by investigating the principles and processes that underlie many of the most profound problems facing society today.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
