{"title":"Exudyn——一个基于c++的Python包,用于灵活的多体系统","authors":"Johannes Gerstmayr","doi":"10.1007/s11044-023-09937-1","DOIUrl":null,"url":null,"abstract":"Abstract The present contribution introduces the design, methods, functionalities, and capabilities of the open-source multibody dynamics code Exudyn, which has been developed since 2019. The code has been designed for rigid and flexible multibody systems, with a focus on performance for multicore desktop processors. It includes script-language-based modeling and it is intended to be used in science and education, but also in industry. The open-source code is available on GitHub and consists of a main C++ core, a rich Python interface including pre- and postprocessing modules in Python, and a collection of rigid and flexible bodies with appropriate joint, load, and sensor functionality. Integrated solvers allow explicit and implicit time integration, static solution, eigenvalue analysis, and optimization. In the paper, the code design, structure, computational core, computational objects, and multibody formulations are addressed. In addition, the computational performance is evaluated with examples of rigid and flexible multibody systems. The results show the significant impact of multithreading especially for small systems, but also for larger models.","PeriodicalId":49792,"journal":{"name":"Multibody System Dynamics","volume":"91 1","pages":"0"},"PeriodicalIF":2.4000,"publicationDate":"2023-10-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"2","resultStr":"{\"title\":\"Exudyn – a C++-based Python package for flexible multibody systems\",\"authors\":\"Johannes Gerstmayr\",\"doi\":\"10.1007/s11044-023-09937-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Abstract The present contribution introduces the design, methods, functionalities, and capabilities of the open-source multibody dynamics code Exudyn, which has been developed since 2019. The code has been designed for rigid and flexible multibody systems, with a focus on performance for multicore desktop processors. It includes script-language-based modeling and it is intended to be used in science and education, but also in industry. The open-source code is available on GitHub and consists of a main C++ core, a rich Python interface including pre- and postprocessing modules in Python, and a collection of rigid and flexible bodies with appropriate joint, load, and sensor functionality. Integrated solvers allow explicit and implicit time integration, static solution, eigenvalue analysis, and optimization. In the paper, the code design, structure, computational core, computational objects, and multibody formulations are addressed. In addition, the computational performance is evaluated with examples of rigid and flexible multibody systems. The results show the significant impact of multithreading especially for small systems, but also for larger models.\",\"PeriodicalId\":49792,\"journal\":{\"name\":\"Multibody System Dynamics\",\"volume\":\"91 1\",\"pages\":\"0\"},\"PeriodicalIF\":2.4000,\"publicationDate\":\"2023-10-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Multibody System Dynamics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s11044-023-09937-1\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"MECHANICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Multibody System Dynamics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s11044-023-09937-1","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MECHANICS","Score":null,"Total":0}
Exudyn – a C++-based Python package for flexible multibody systems
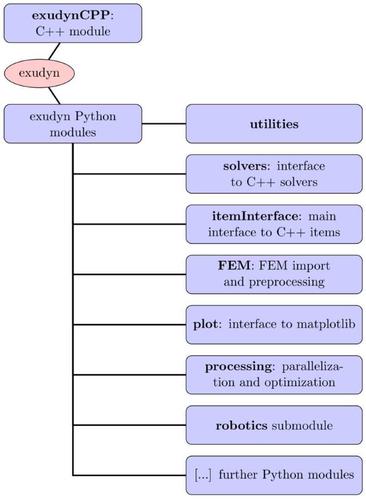
Abstract The present contribution introduces the design, methods, functionalities, and capabilities of the open-source multibody dynamics code Exudyn, which has been developed since 2019. The code has been designed for rigid and flexible multibody systems, with a focus on performance for multicore desktop processors. It includes script-language-based modeling and it is intended to be used in science and education, but also in industry. The open-source code is available on GitHub and consists of a main C++ core, a rich Python interface including pre- and postprocessing modules in Python, and a collection of rigid and flexible bodies with appropriate joint, load, and sensor functionality. Integrated solvers allow explicit and implicit time integration, static solution, eigenvalue analysis, and optimization. In the paper, the code design, structure, computational core, computational objects, and multibody formulations are addressed. In addition, the computational performance is evaluated with examples of rigid and flexible multibody systems. The results show the significant impact of multithreading especially for small systems, but also for larger models.
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
