{"title":"使用互形记忆合金致动器的微定位平台的广义普朗特-伊什林斯基模型的参数识别","authors":"H. Rahbari, A. Fathi, M. Dardel","doi":"10.1007/s40799-023-00680-y","DOIUrl":null,"url":null,"abstract":"<div><p>Implementing smart materials as an actuator in fabricating micro-positioning systems has become pervasive in recent years. However, the application of Shape Memory Alloy (SMA) smart materials is limited due to its complex nonlinear mechanical behavior, such as asymmetric hysteresis and saturation characteristics. One of the most potent experimental-based methods of modeling these nonlinearities is the Generalized Prandtl-Ishlinskii (GPI) model. Unlike similar methods such as the Preisach model, this model is analytically invertible. This study aims to develop a micro-positioning stage and identify an experimental-based model describing the system response. The model structure is composed of two cascade sub-models. In the first sub-model, which models the actuator thermal behavior, the parameters of a linear dynamic model are identified. This sub-model predicts the actuator temperature given the electrical current. The second sub-model estimates the phase transformation and consequently the actuator displacement as a function of temperature. The GPI structure has been used for constructing the Wiener sub-model. The experimental and numerical results showed that the proposed black box model can accurately describe the system behavior, although identifying a comprehensive model to adequately describe the SMA actuator is a great challenge.</p></div>","PeriodicalId":553,"journal":{"name":"Experimental Techniques","volume":"48 4","pages":"585 - 597"},"PeriodicalIF":1.5000,"publicationDate":"2023-10-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Parameters Identification of a Generalized Prandtl-Ishlinskii Model for a Micro-Positioning Stage Using Mutual Shape Memory Alloy Actuators\",\"authors\":\"H. Rahbari, A. Fathi, M. Dardel\",\"doi\":\"10.1007/s40799-023-00680-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Implementing smart materials as an actuator in fabricating micro-positioning systems has become pervasive in recent years. However, the application of Shape Memory Alloy (SMA) smart materials is limited due to its complex nonlinear mechanical behavior, such as asymmetric hysteresis and saturation characteristics. One of the most potent experimental-based methods of modeling these nonlinearities is the Generalized Prandtl-Ishlinskii (GPI) model. Unlike similar methods such as the Preisach model, this model is analytically invertible. This study aims to develop a micro-positioning stage and identify an experimental-based model describing the system response. The model structure is composed of two cascade sub-models. In the first sub-model, which models the actuator thermal behavior, the parameters of a linear dynamic model are identified. This sub-model predicts the actuator temperature given the electrical current. The second sub-model estimates the phase transformation and consequently the actuator displacement as a function of temperature. The GPI structure has been used for constructing the Wiener sub-model. The experimental and numerical results showed that the proposed black box model can accurately describe the system behavior, although identifying a comprehensive model to adequately describe the SMA actuator is a great challenge.</p></div>\",\"PeriodicalId\":553,\"journal\":{\"name\":\"Experimental Techniques\",\"volume\":\"48 4\",\"pages\":\"585 - 597\"},\"PeriodicalIF\":1.5000,\"publicationDate\":\"2023-10-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Experimental Techniques\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s40799-023-00680-y\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Experimental Techniques","FirstCategoryId":"5","ListUrlMain":"https://link.springer.com/article/10.1007/s40799-023-00680-y","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
摘要
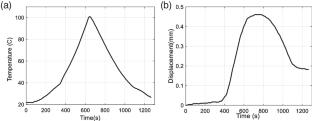
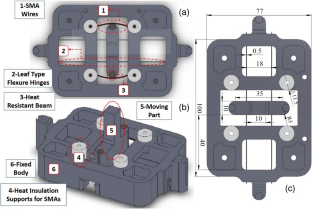
近年来,将智能材料作为致动器用于制造微定位系统已变得十分普遍。然而,由于形状记忆合金(SMA)智能材料具有复杂的非线性机械行为,如非对称滞后和饱和特性,其应用受到了限制。广义普朗特-伊什林斯基(GPI)模型是基于实验对这些非线性特性进行建模的最有效方法之一。与 Preisach 模型等类似方法不同的是,该模型在分析上是可逆的。本研究旨在开发一个微型定位台,并确定一个基于实验的描述系统响应的模型。模型结构由两个级联子模型组成。第一个子模型是致动器热行为模型,确定了线性动态模型的参数。该子模型根据电流预测致动器的温度。第二个子模型估算相变,进而估算作为温度函数的致动器位移。维纳子模型采用 GPI 结构。实验和数值结果表明,所提出的黑盒模型能够准确描述系统行为,尽管确定一个全面的模型来充分描述 SMA 激励器是一项巨大的挑战。
Parameters Identification of a Generalized Prandtl-Ishlinskii Model for a Micro-Positioning Stage Using Mutual Shape Memory Alloy Actuators
Implementing smart materials as an actuator in fabricating micro-positioning systems has become pervasive in recent years. However, the application of Shape Memory Alloy (SMA) smart materials is limited due to its complex nonlinear mechanical behavior, such as asymmetric hysteresis and saturation characteristics. One of the most potent experimental-based methods of modeling these nonlinearities is the Generalized Prandtl-Ishlinskii (GPI) model. Unlike similar methods such as the Preisach model, this model is analytically invertible. This study aims to develop a micro-positioning stage and identify an experimental-based model describing the system response. The model structure is composed of two cascade sub-models. In the first sub-model, which models the actuator thermal behavior, the parameters of a linear dynamic model are identified. This sub-model predicts the actuator temperature given the electrical current. The second sub-model estimates the phase transformation and consequently the actuator displacement as a function of temperature. The GPI structure has been used for constructing the Wiener sub-model. The experimental and numerical results showed that the proposed black box model can accurately describe the system behavior, although identifying a comprehensive model to adequately describe the SMA actuator is a great challenge.
期刊介绍:
Experimental Techniques is a bimonthly interdisciplinary publication of the Society for Experimental Mechanics focusing on the development, application and tutorial of experimental mechanics techniques.
The purpose for Experimental Techniques is to promote pedagogical, technical and practical advancements in experimental mechanics while supporting the Society''s mission and commitment to interdisciplinary application, research and development, education, and active promotion of experimental methods to:
- Increase the knowledge of physical phenomena
- Further the understanding of the behavior of materials, structures, and systems
- Provide the necessary physical observations necessary to improve and assess new analytical and computational approaches.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
