{"title":"软波纹管机器人机构设计与动力学建模","authors":"Jiang Ding, Hanfei Su, Deli Xia, Changyang Huang","doi":"10.1007/s40997-023-00721-2","DOIUrl":null,"url":null,"abstract":"<p>Soft bellows robots exhibit exceptional movement capabilities owing to their considerable retractability and high flexibility. Nonetheless, accurately describing the relationship between their actual movements and the forces they exert remains a significant challenge. To address this challenge, this paper proposes a dynamic modeling method for soft bellows robots. Initially, a soft bellows robot is designed as the subject of study, and its movement is categorized into two modes: straight crawling and steering, based on their respective functions. Subsequently, leveraging the constant curvature bending assumption, the relationships between the deformation and pose of the soft bellows actuators (SBAs) constituting the soft bellows robot are meticulously analyzed. Dynamic models for the SBAs are then established. Finally, the validity of these dynamic models for the SBAs is confirmed through controlled testing, thereby verifying the two movement modes of the soft bellows robot. In summary, the dynamic modeling method presented in this paper enhances the theoretical framework of soft bellows robots and provides crucial theoretical support for precise control.</p>","PeriodicalId":49063,"journal":{"name":"Iranian Journal of Science and Technology-Transactions of Mechanical Engineering","volume":"27 1","pages":""},"PeriodicalIF":1.7000,"publicationDate":"2023-11-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Mechanism Design and Dynamic Modeling of Soft Bellows Robot\",\"authors\":\"Jiang Ding, Hanfei Su, Deli Xia, Changyang Huang\",\"doi\":\"10.1007/s40997-023-00721-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Soft bellows robots exhibit exceptional movement capabilities owing to their considerable retractability and high flexibility. Nonetheless, accurately describing the relationship between their actual movements and the forces they exert remains a significant challenge. To address this challenge, this paper proposes a dynamic modeling method for soft bellows robots. Initially, a soft bellows robot is designed as the subject of study, and its movement is categorized into two modes: straight crawling and steering, based on their respective functions. Subsequently, leveraging the constant curvature bending assumption, the relationships between the deformation and pose of the soft bellows actuators (SBAs) constituting the soft bellows robot are meticulously analyzed. Dynamic models for the SBAs are then established. Finally, the validity of these dynamic models for the SBAs is confirmed through controlled testing, thereby verifying the two movement modes of the soft bellows robot. In summary, the dynamic modeling method presented in this paper enhances the theoretical framework of soft bellows robots and provides crucial theoretical support for precise control.</p>\",\"PeriodicalId\":49063,\"journal\":{\"name\":\"Iranian Journal of Science and Technology-Transactions of Mechanical Engineering\",\"volume\":\"27 1\",\"pages\":\"\"},\"PeriodicalIF\":1.7000,\"publicationDate\":\"2023-11-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Iranian Journal of Science and Technology-Transactions of Mechanical Engineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s40997-023-00721-2\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iranian Journal of Science and Technology-Transactions of Mechanical Engineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s40997-023-00721-2","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
Mechanism Design and Dynamic Modeling of Soft Bellows Robot
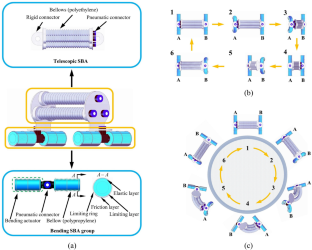
Soft bellows robots exhibit exceptional movement capabilities owing to their considerable retractability and high flexibility. Nonetheless, accurately describing the relationship between their actual movements and the forces they exert remains a significant challenge. To address this challenge, this paper proposes a dynamic modeling method for soft bellows robots. Initially, a soft bellows robot is designed as the subject of study, and its movement is categorized into two modes: straight crawling and steering, based on their respective functions. Subsequently, leveraging the constant curvature bending assumption, the relationships between the deformation and pose of the soft bellows actuators (SBAs) constituting the soft bellows robot are meticulously analyzed. Dynamic models for the SBAs are then established. Finally, the validity of these dynamic models for the SBAs is confirmed through controlled testing, thereby verifying the two movement modes of the soft bellows robot. In summary, the dynamic modeling method presented in this paper enhances the theoretical framework of soft bellows robots and provides crucial theoretical support for precise control.
期刊介绍:
Transactions of Mechanical Engineering is to foster the growth of scientific research in all branches of mechanical engineering and its related grounds and to provide a medium by means of which the fruits of these researches may be brought to the attentionof the world’s scientific communities. The journal has the focus on the frontier topics in the theoretical, mathematical, numerical, experimental and scientific developments in mechanical engineering as well
as applications of established techniques to new domains in various mechanical engineering disciplines such as: Solid Mechanics, Kinematics, Dynamics Vibration and Control, Fluids Mechanics, Thermodynamics and Heat Transfer, Energy and Environment, Computational Mechanics, Bio Micro and Nano Mechanics and Design and Materials Engineering & Manufacturing.
The editors will welcome papers from all professors and researchers from universities, research centers,
organizations, companies and industries from all over the world in the hope that this will advance the scientific standards of the journal and provide a channel of communication between Iranian Scholars and their colleague in other parts of the world.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
