{"title":"社交机器人Nao是否有助于高功能自闭症儿童的合作?","authors":"Viviane Kostrubiec, Chloé Lajunta, Pierre-Vincent Paubel, Jeanne Kruck","doi":"10.1007/s12369-023-01063-4","DOIUrl":null,"url":null,"abstract":"<p>We designed a coordination–cooperation game dedicated to teaching the theory of mind (ToM) to children with autism spectrum disorder. Children interacted with either a robot or a human. They had to coordinate their gestures with the beats of a ditty sung by their partner (coordination), who then implicitly asked them for help (cooperation). Before and after this cooperation–coordination task, the children performed a helping task that assessed their ToM skills: the ability to infer social partners’ intentions. Despite the regularity and predictability of the robot, children made the most progress in the helping task after interacting with a human. Motor coupling was more stable in child–human than in child–robot dyads. The ability of the social partner to actively maintain a stable social coupling seems to be a primary factor inciting the child to learn and transfer the just-practiced social skills.</p>","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"47 1","pages":""},"PeriodicalIF":3.7000,"publicationDate":"2023-12-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Does the Social Robot Nao Facilitate Cooperation in High Functioning Children with ASD?\",\"authors\":\"Viviane Kostrubiec, Chloé Lajunta, Pierre-Vincent Paubel, Jeanne Kruck\",\"doi\":\"10.1007/s12369-023-01063-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>We designed a coordination–cooperation game dedicated to teaching the theory of mind (ToM) to children with autism spectrum disorder. Children interacted with either a robot or a human. They had to coordinate their gestures with the beats of a ditty sung by their partner (coordination), who then implicitly asked them for help (cooperation). Before and after this cooperation–coordination task, the children performed a helping task that assessed their ToM skills: the ability to infer social partners’ intentions. Despite the regularity and predictability of the robot, children made the most progress in the helping task after interacting with a human. Motor coupling was more stable in child–human than in child–robot dyads. The ability of the social partner to actively maintain a stable social coupling seems to be a primary factor inciting the child to learn and transfer the just-practiced social skills.</p>\",\"PeriodicalId\":14361,\"journal\":{\"name\":\"International Journal of Social Robotics\",\"volume\":\"47 1\",\"pages\":\"\"},\"PeriodicalIF\":3.7000,\"publicationDate\":\"2023-12-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Social Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s12369-023-01063-4\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s12369-023-01063-4","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
Does the Social Robot Nao Facilitate Cooperation in High Functioning Children with ASD?
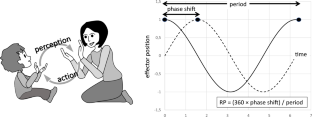
We designed a coordination–cooperation game dedicated to teaching the theory of mind (ToM) to children with autism spectrum disorder. Children interacted with either a robot or a human. They had to coordinate their gestures with the beats of a ditty sung by their partner (coordination), who then implicitly asked them for help (cooperation). Before and after this cooperation–coordination task, the children performed a helping task that assessed their ToM skills: the ability to infer social partners’ intentions. Despite the regularity and predictability of the robot, children made the most progress in the helping task after interacting with a human. Motor coupling was more stable in child–human than in child–robot dyads. The ability of the social partner to actively maintain a stable social coupling seems to be a primary factor inciting the child to learn and transfer the just-practiced social skills.
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
