{"title":"用于 3D 物体检测的自适应学习点云和图像多样性特征融合网络","authors":"Weiqing Yan, Shile Liu, Hao Liu, Guanghui Yue, Xuan Wang, Yongchao Song, Jindong Xu","doi":"10.1007/s40747-023-01295-x","DOIUrl":null,"url":null,"abstract":"<p>3D object detection is a critical task in the fields of virtual reality and autonomous driving. Given that each sensor has its own strengths and limitations, multi-sensor-based 3D object detection has gained popularity. However, most existing methods extract high-level image semantic features and fuse them with point cloud features, focusing solely on consistent information from both sensors while ignoring their complementary information. In this paper, we present a novel two-stage multi-sensor deep neural network, called the adaptive learning point cloud and image diversity feature fusion network (APIDFF-Net), for 3D object detection. Our approach employs the fine-grained image information to complement the point cloud information by combining low-level image features with high-level point cloud features. Specifically, we design a shallow image feature extraction module to learn fine-grained information from images, instead of relying on deep layer features with coarse-grained information. Furthermore, we design a diversity feature fusion (DFF) module that transforms low-level image features into point-wise image features and explores their complementary features through an attention mechanism, ensuring an effective combination of fine-grained image features and point cloud features. Experiments on the KITTI benchmark show that the proposed method outperforms state-of-the-art methods.</p>","PeriodicalId":10524,"journal":{"name":"Complex & Intelligent Systems","volume":"2 1","pages":""},"PeriodicalIF":4.6000,"publicationDate":"2023-12-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Adaptive learning point cloud and image diversity feature fusion network for 3D object detection\",\"authors\":\"Weiqing Yan, Shile Liu, Hao Liu, Guanghui Yue, Xuan Wang, Yongchao Song, Jindong Xu\",\"doi\":\"10.1007/s40747-023-01295-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>3D object detection is a critical task in the fields of virtual reality and autonomous driving. Given that each sensor has its own strengths and limitations, multi-sensor-based 3D object detection has gained popularity. However, most existing methods extract high-level image semantic features and fuse them with point cloud features, focusing solely on consistent information from both sensors while ignoring their complementary information. In this paper, we present a novel two-stage multi-sensor deep neural network, called the adaptive learning point cloud and image diversity feature fusion network (APIDFF-Net), for 3D object detection. Our approach employs the fine-grained image information to complement the point cloud information by combining low-level image features with high-level point cloud features. Specifically, we design a shallow image feature extraction module to learn fine-grained information from images, instead of relying on deep layer features with coarse-grained information. Furthermore, we design a diversity feature fusion (DFF) module that transforms low-level image features into point-wise image features and explores their complementary features through an attention mechanism, ensuring an effective combination of fine-grained image features and point cloud features. Experiments on the KITTI benchmark show that the proposed method outperforms state-of-the-art methods.</p>\",\"PeriodicalId\":10524,\"journal\":{\"name\":\"Complex & Intelligent Systems\",\"volume\":\"2 1\",\"pages\":\"\"},\"PeriodicalIF\":4.6000,\"publicationDate\":\"2023-12-15\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Complex & Intelligent Systems\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s40747-023-01295-x\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Complex & Intelligent Systems","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s40747-023-01295-x","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Adaptive learning point cloud and image diversity feature fusion network for 3D object detection
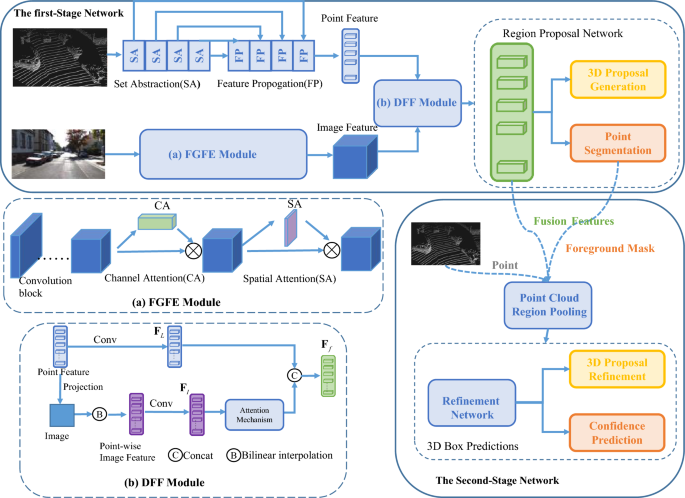
3D object detection is a critical task in the fields of virtual reality and autonomous driving. Given that each sensor has its own strengths and limitations, multi-sensor-based 3D object detection has gained popularity. However, most existing methods extract high-level image semantic features and fuse them with point cloud features, focusing solely on consistent information from both sensors while ignoring their complementary information. In this paper, we present a novel two-stage multi-sensor deep neural network, called the adaptive learning point cloud and image diversity feature fusion network (APIDFF-Net), for 3D object detection. Our approach employs the fine-grained image information to complement the point cloud information by combining low-level image features with high-level point cloud features. Specifically, we design a shallow image feature extraction module to learn fine-grained information from images, instead of relying on deep layer features with coarse-grained information. Furthermore, we design a diversity feature fusion (DFF) module that transforms low-level image features into point-wise image features and explores their complementary features through an attention mechanism, ensuring an effective combination of fine-grained image features and point cloud features. Experiments on the KITTI benchmark show that the proposed method outperforms state-of-the-art methods.
期刊介绍:
Complex & Intelligent Systems aims to provide a forum for presenting and discussing novel approaches, tools and techniques meant for attaining a cross-fertilization between the broad fields of complex systems, computational simulation, and intelligent analytics and visualization. The transdisciplinary research that the journal focuses on will expand the boundaries of our understanding by investigating the principles and processes that underlie many of the most profound problems facing society today.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
