{"title":"DetailPoint:利用注意力机制对点云进行详细特征学习","authors":"Ying Li, Jincheng Bai, Huankun Sheng","doi":"10.1007/s00138-023-01491-2","DOIUrl":null,"url":null,"abstract":"<p>Point cloud analysis is an important part of 3D geometric processing. It has been widely used in many fields, such as automatic driving and robots. Although great progress has been made in recent years, there are still some unresolved problems. For example, current methods devote employing MLP to extract local features after search k neighbor points, they cannot effectively model the dependency relationship between the anchor point and k neighboring points. In addition, the prevailing models may not exploit the inherent structural similarities present in the global scope. To solve these issues, we propose a feature extraction model named DetailPoint to get detailed local information and long-range global dependency of point clouds. DetailPoint possess three units: the shallow local learning unit, the deep local learning unit and the deep global learning unit. We first use the SLL to extract shallow local features, and then use the DLL to learn deep local features. In these two units, we design a dual-path extraction method to acquire detail local features with dependencies. Finally, the DGL unit is employed to improve the generalization ability of local features and establish global interaction. These three units are connected in series to form our DetailPoint. We evaluated the performance of our model on four datasets, ScanObjectNN and ModelNet40 for shape classification, the ShapeNet dataset for part segmentation, and the S3DIS dataset for sementatic segmentations. The experimental results demonstrate that DetailPoint is capable of expressing point clouds more effectively, resulting in superior performance compared to existing methods.</p>","PeriodicalId":51116,"journal":{"name":"Machine Vision and Applications","volume":"72 1","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2023-12-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"DetailPoint: detailed feature learning on point clouds with attention mechanism\",\"authors\":\"Ying Li, Jincheng Bai, Huankun Sheng\",\"doi\":\"10.1007/s00138-023-01491-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Point cloud analysis is an important part of 3D geometric processing. It has been widely used in many fields, such as automatic driving and robots. Although great progress has been made in recent years, there are still some unresolved problems. For example, current methods devote employing MLP to extract local features after search k neighbor points, they cannot effectively model the dependency relationship between the anchor point and k neighboring points. In addition, the prevailing models may not exploit the inherent structural similarities present in the global scope. To solve these issues, we propose a feature extraction model named DetailPoint to get detailed local information and long-range global dependency of point clouds. DetailPoint possess three units: the shallow local learning unit, the deep local learning unit and the deep global learning unit. We first use the SLL to extract shallow local features, and then use the DLL to learn deep local features. In these two units, we design a dual-path extraction method to acquire detail local features with dependencies. Finally, the DGL unit is employed to improve the generalization ability of local features and establish global interaction. These three units are connected in series to form our DetailPoint. We evaluated the performance of our model on four datasets, ScanObjectNN and ModelNet40 for shape classification, the ShapeNet dataset for part segmentation, and the S3DIS dataset for sementatic segmentations. The experimental results demonstrate that DetailPoint is capable of expressing point clouds more effectively, resulting in superior performance compared to existing methods.</p>\",\"PeriodicalId\":51116,\"journal\":{\"name\":\"Machine Vision and Applications\",\"volume\":\"72 1\",\"pages\":\"\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2023-12-18\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Machine Vision and Applications\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s00138-023-01491-2\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Machine Vision and Applications","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s00138-023-01491-2","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
DetailPoint: detailed feature learning on point clouds with attention mechanism
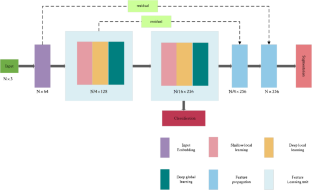
Point cloud analysis is an important part of 3D geometric processing. It has been widely used in many fields, such as automatic driving and robots. Although great progress has been made in recent years, there are still some unresolved problems. For example, current methods devote employing MLP to extract local features after search k neighbor points, they cannot effectively model the dependency relationship between the anchor point and k neighboring points. In addition, the prevailing models may not exploit the inherent structural similarities present in the global scope. To solve these issues, we propose a feature extraction model named DetailPoint to get detailed local information and long-range global dependency of point clouds. DetailPoint possess three units: the shallow local learning unit, the deep local learning unit and the deep global learning unit. We first use the SLL to extract shallow local features, and then use the DLL to learn deep local features. In these two units, we design a dual-path extraction method to acquire detail local features with dependencies. Finally, the DGL unit is employed to improve the generalization ability of local features and establish global interaction. These three units are connected in series to form our DetailPoint. We evaluated the performance of our model on four datasets, ScanObjectNN and ModelNet40 for shape classification, the ShapeNet dataset for part segmentation, and the S3DIS dataset for sementatic segmentations. The experimental results demonstrate that DetailPoint is capable of expressing point clouds more effectively, resulting in superior performance compared to existing methods.
期刊介绍:
Machine Vision and Applications publishes high-quality technical contributions in machine vision research and development. Specifically, the editors encourage submittals in all applications and engineering aspects of image-related computing. In particular, original contributions dealing with scientific, commercial, industrial, military, and biomedical applications of machine vision, are all within the scope of the journal.
Particular emphasis is placed on engineering and technology aspects of image processing and computer vision.
The following aspects of machine vision applications are of interest: algorithms, architectures, VLSI implementations, AI techniques and expert systems for machine vision, front-end sensing, multidimensional and multisensor machine vision, real-time techniques, image databases, virtual reality and visualization. Papers must include a significant experimental validation component.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
