Zhen Yang, Song Huang, Changyou Zheng, Xingya Wang, Yang Wang, Chunyan Xia
{"title":"MetaLiDAR:基于激光雷达的自动驾驶系统自动变形测试","authors":"Zhen Yang, Song Huang, Changyou Zheng, Xingya Wang, Yang Wang, Chunyan Xia","doi":"10.1002/smr.2644","DOIUrl":null,"url":null,"abstract":"<p>Recent advances in artificial intelligence technology and perception components have promoted the rapid development of autonomous vehicles. However, as safety-critical software, autonomous driving systems often make wrong judgments, seriously threatening human and property safety. LiDAR is one of the most critical sensors in autonomous vehicles, capable of accurately perceiving the three-dimensional information of the environment. Nevertheless, the high cost of manually collecting and labeling point cloud data leads to a dearth of testing methods for LiDAR-based perception modules. To bridge the critical gap, we introduce MetaLiDAR, a novel automated metamorphic testing methodology for LiDAR-based autonomous driving systems. First, we propose three object-level metamorphic relations for the domain characteristics of autonomous driving systems. Next, we design three transformation modules so that MetaLiDAR can generate natural-looking follow-up point clouds. Finally, we define corresponding evaluation metrics based on metamorphic relations. MetaLiDAR automatically determines whether source and follow-up test cases meet the metamorphic relations based on the evaluation metrics. Our empirical research on five state-of-the-art LiDAR-based object detection models shows that MetaLiDAR can not only generate natural-looking test point clouds to detect 181,547 inconsistent behaviors of different models but also significantly enhance the robustness of models by retraining with synthetic point clouds.</p>","PeriodicalId":48898,"journal":{"name":"Journal of Software-Evolution and Process","volume":"36 7","pages":""},"PeriodicalIF":1.8000,"publicationDate":"2023-12-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"MetaLiDAR: Automated metamorphic testing of LiDAR-based autonomous driving systems\",\"authors\":\"Zhen Yang, Song Huang, Changyou Zheng, Xingya Wang, Yang Wang, Chunyan Xia\",\"doi\":\"10.1002/smr.2644\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Recent advances in artificial intelligence technology and perception components have promoted the rapid development of autonomous vehicles. However, as safety-critical software, autonomous driving systems often make wrong judgments, seriously threatening human and property safety. LiDAR is one of the most critical sensors in autonomous vehicles, capable of accurately perceiving the three-dimensional information of the environment. Nevertheless, the high cost of manually collecting and labeling point cloud data leads to a dearth of testing methods for LiDAR-based perception modules. To bridge the critical gap, we introduce MetaLiDAR, a novel automated metamorphic testing methodology for LiDAR-based autonomous driving systems. First, we propose three object-level metamorphic relations for the domain characteristics of autonomous driving systems. Next, we design three transformation modules so that MetaLiDAR can generate natural-looking follow-up point clouds. Finally, we define corresponding evaluation metrics based on metamorphic relations. MetaLiDAR automatically determines whether source and follow-up test cases meet the metamorphic relations based on the evaluation metrics. Our empirical research on five state-of-the-art LiDAR-based object detection models shows that MetaLiDAR can not only generate natural-looking test point clouds to detect 181,547 inconsistent behaviors of different models but also significantly enhance the robustness of models by retraining with synthetic point clouds.</p>\",\"PeriodicalId\":48898,\"journal\":{\"name\":\"Journal of Software-Evolution and Process\",\"volume\":\"36 7\",\"pages\":\"\"},\"PeriodicalIF\":1.8000,\"publicationDate\":\"2023-12-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Software-Evolution and Process\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/smr.2644\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, SOFTWARE ENGINEERING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Software-Evolution and Process","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/smr.2644","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
MetaLiDAR: Automated metamorphic testing of LiDAR-based autonomous driving systems
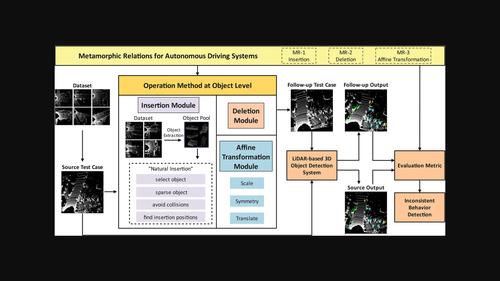
Recent advances in artificial intelligence technology and perception components have promoted the rapid development of autonomous vehicles. However, as safety-critical software, autonomous driving systems often make wrong judgments, seriously threatening human and property safety. LiDAR is one of the most critical sensors in autonomous vehicles, capable of accurately perceiving the three-dimensional information of the environment. Nevertheless, the high cost of manually collecting and labeling point cloud data leads to a dearth of testing methods for LiDAR-based perception modules. To bridge the critical gap, we introduce MetaLiDAR, a novel automated metamorphic testing methodology for LiDAR-based autonomous driving systems. First, we propose three object-level metamorphic relations for the domain characteristics of autonomous driving systems. Next, we design three transformation modules so that MetaLiDAR can generate natural-looking follow-up point clouds. Finally, we define corresponding evaluation metrics based on metamorphic relations. MetaLiDAR automatically determines whether source and follow-up test cases meet the metamorphic relations based on the evaluation metrics. Our empirical research on five state-of-the-art LiDAR-based object detection models shows that MetaLiDAR can not only generate natural-looking test point clouds to detect 181,547 inconsistent behaviors of different models but also significantly enhance the robustness of models by retraining with synthetic point clouds.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
