{"title":"在泥泞地形上行驶的机器人在潮汐滩涂采集底泥样本","authors":"Masatoshi Hatano, Manami Senzaki, Hidetoshi Kawasaki, Chiaki Takasu, Masaki Yamazaki, Yukiyoshi Hoshigami","doi":"10.1007/s10015-023-00920-9","DOIUrl":null,"url":null,"abstract":"<div><p>The purpose of this research is to develop robots that perform mud sampling on tidal flats automatically. Erosions that occur on beaches and sands go away to offshore caused by waves, winds and so on. In addition, the phenomena have not been clarified. Thus, a mathematical model has been proposed to analyze the phenomena. Then, parameters in the model are required to be identified by collecting bottom sediments. Now, the collections of bottom sediments are achieved with manpower. However, surfaces of tidal flats are of mud and hard to walk on. In this paper, a robot for collecting bottom sediments on tidal flats is proposed. During traveling on muddy terrains, the robot has to avoid obstacles, i.e., wastes, driftwoods and so on. Then, the SSD (single shot multibox detector) was used to detect objects with image recognition. Fundamental experiments were performed in our laboratory and it was shown that the developed robot could perform the fundamental desired tasks.</p></div>","PeriodicalId":46050,"journal":{"name":"Artificial Life and Robotics","volume":"29 1","pages":"155 - 160"},"PeriodicalIF":0.8000,"publicationDate":"2023-12-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Robots traveling on muddy terrain for sampling bottom sediment in tidal flats\",\"authors\":\"Masatoshi Hatano, Manami Senzaki, Hidetoshi Kawasaki, Chiaki Takasu, Masaki Yamazaki, Yukiyoshi Hoshigami\",\"doi\":\"10.1007/s10015-023-00920-9\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>The purpose of this research is to develop robots that perform mud sampling on tidal flats automatically. Erosions that occur on beaches and sands go away to offshore caused by waves, winds and so on. In addition, the phenomena have not been clarified. Thus, a mathematical model has been proposed to analyze the phenomena. Then, parameters in the model are required to be identified by collecting bottom sediments. Now, the collections of bottom sediments are achieved with manpower. However, surfaces of tidal flats are of mud and hard to walk on. In this paper, a robot for collecting bottom sediments on tidal flats is proposed. During traveling on muddy terrains, the robot has to avoid obstacles, i.e., wastes, driftwoods and so on. Then, the SSD (single shot multibox detector) was used to detect objects with image recognition. Fundamental experiments were performed in our laboratory and it was shown that the developed robot could perform the fundamental desired tasks.</p></div>\",\"PeriodicalId\":46050,\"journal\":{\"name\":\"Artificial Life and Robotics\",\"volume\":\"29 1\",\"pages\":\"155 - 160\"},\"PeriodicalIF\":0.8000,\"publicationDate\":\"2023-12-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Artificial Life and Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10015-023-00920-9\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Artificial Life and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1007/s10015-023-00920-9","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ROBOTICS","Score":null,"Total":0}
Robots traveling on muddy terrain for sampling bottom sediment in tidal flats
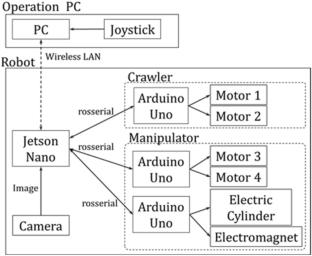
The purpose of this research is to develop robots that perform mud sampling on tidal flats automatically. Erosions that occur on beaches and sands go away to offshore caused by waves, winds and so on. In addition, the phenomena have not been clarified. Thus, a mathematical model has been proposed to analyze the phenomena. Then, parameters in the model are required to be identified by collecting bottom sediments. Now, the collections of bottom sediments are achieved with manpower. However, surfaces of tidal flats are of mud and hard to walk on. In this paper, a robot for collecting bottom sediments on tidal flats is proposed. During traveling on muddy terrains, the robot has to avoid obstacles, i.e., wastes, driftwoods and so on. Then, the SSD (single shot multibox detector) was used to detect objects with image recognition. Fundamental experiments were performed in our laboratory and it was shown that the developed robot could perform the fundamental desired tasks.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
