Ran Guo, Wenjiang Li, Yulong He, Tangjian Zeng, Bin Li, Guangkui Song, Jing Qiu
{"title":"城市多地形环境中外骨骼机器人的地形坡度参数识别","authors":"Ran Guo, Wenjiang Li, Yulong He, Tangjian Zeng, Bin Li, Guangkui Song, Jing Qiu","doi":"10.1007/s40747-023-01319-6","DOIUrl":null,"url":null,"abstract":"<p>Lower limb augmentation exoskeletons (LLAE) have been applied in several domains to enforce human walking capability. As humans can adjust their joint moments and generate different amounts of mechanical energy while walking on different terrains, the LLAEs should provide adaptive augmented torques to the wearer in multi-terrain environments, which requires LLAEs to implement accurate terrain parameter recognition. However, the outputs of previous terrain parameter recognition algorithms are more redundant, and the algorithms have higher computational complexity and are susceptible to external interference. Therefore, to resolve the above issues, this paper proposed a neural network regression (NNR)-based algorithm for terrain slope parameter recognition. In particular, this paper defined for the first time a unified representation of terrain parameters: terrain slope (TS), a single parameter that can provide enough information for exoskeleton control. In addition, our proposed NNR model uses only basic human parameters and LLAE joint motion posture measured by an Inertial Measurement Unit (IMU) as inputs to predict the TS, which is computationally simpler and less susceptible to interference. The model was evaluated using K-fold cross-validation and the results showed that the model had an average error of only 2.09<span>\\(^\\circ \\)</span>. To further validate the effectiveness of the proposed algorithm, it was verified on a homemade LLAE and the experimental results showed that the proposed TS parameter recognition algorithm only produces an average error of 3.73<span>\\(^\\circ \\)</span> in multi-terrain environments. The defined terrain parameters can meet the control requirements of LLAE in urban multi-terrain environments. The proposed TS parameter recognition algorithm could facilitate the optimization of the adaptive gait control of the exoskeleton system and improve user experience, energy efficiency, and overall comfort.</p>","PeriodicalId":10524,"journal":{"name":"Complex & Intelligent Systems","volume":"94 1","pages":""},"PeriodicalIF":5.0000,"publicationDate":"2024-01-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Terrain slope parameter recognition for exoskeleton robot in urban multi-terrain environments\",\"authors\":\"Ran Guo, Wenjiang Li, Yulong He, Tangjian Zeng, Bin Li, Guangkui Song, Jing Qiu\",\"doi\":\"10.1007/s40747-023-01319-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Lower limb augmentation exoskeletons (LLAE) have been applied in several domains to enforce human walking capability. As humans can adjust their joint moments and generate different amounts of mechanical energy while walking on different terrains, the LLAEs should provide adaptive augmented torques to the wearer in multi-terrain environments, which requires LLAEs to implement accurate terrain parameter recognition. However, the outputs of previous terrain parameter recognition algorithms are more redundant, and the algorithms have higher computational complexity and are susceptible to external interference. Therefore, to resolve the above issues, this paper proposed a neural network regression (NNR)-based algorithm for terrain slope parameter recognition. In particular, this paper defined for the first time a unified representation of terrain parameters: terrain slope (TS), a single parameter that can provide enough information for exoskeleton control. In addition, our proposed NNR model uses only basic human parameters and LLAE joint motion posture measured by an Inertial Measurement Unit (IMU) as inputs to predict the TS, which is computationally simpler and less susceptible to interference. The model was evaluated using K-fold cross-validation and the results showed that the model had an average error of only 2.09<span>\\\\(^\\\\circ \\\\)</span>. To further validate the effectiveness of the proposed algorithm, it was verified on a homemade LLAE and the experimental results showed that the proposed TS parameter recognition algorithm only produces an average error of 3.73<span>\\\\(^\\\\circ \\\\)</span> in multi-terrain environments. The defined terrain parameters can meet the control requirements of LLAE in urban multi-terrain environments. The proposed TS parameter recognition algorithm could facilitate the optimization of the adaptive gait control of the exoskeleton system and improve user experience, energy efficiency, and overall comfort.</p>\",\"PeriodicalId\":10524,\"journal\":{\"name\":\"Complex & Intelligent Systems\",\"volume\":\"94 1\",\"pages\":\"\"},\"PeriodicalIF\":5.0000,\"publicationDate\":\"2024-01-11\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Complex & Intelligent Systems\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s40747-023-01319-6\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Complex & Intelligent Systems","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s40747-023-01319-6","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Terrain slope parameter recognition for exoskeleton robot in urban multi-terrain environments
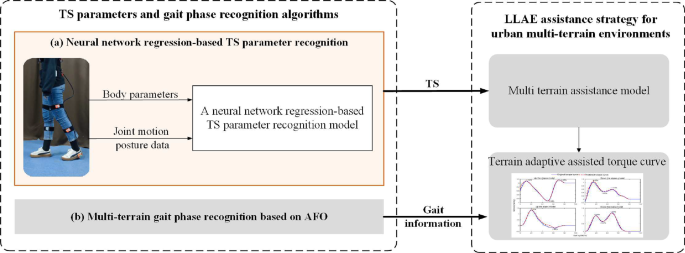
Lower limb augmentation exoskeletons (LLAE) have been applied in several domains to enforce human walking capability. As humans can adjust their joint moments and generate different amounts of mechanical energy while walking on different terrains, the LLAEs should provide adaptive augmented torques to the wearer in multi-terrain environments, which requires LLAEs to implement accurate terrain parameter recognition. However, the outputs of previous terrain parameter recognition algorithms are more redundant, and the algorithms have higher computational complexity and are susceptible to external interference. Therefore, to resolve the above issues, this paper proposed a neural network regression (NNR)-based algorithm for terrain slope parameter recognition. In particular, this paper defined for the first time a unified representation of terrain parameters: terrain slope (TS), a single parameter that can provide enough information for exoskeleton control. In addition, our proposed NNR model uses only basic human parameters and LLAE joint motion posture measured by an Inertial Measurement Unit (IMU) as inputs to predict the TS, which is computationally simpler and less susceptible to interference. The model was evaluated using K-fold cross-validation and the results showed that the model had an average error of only 2.09\(^\circ \). To further validate the effectiveness of the proposed algorithm, it was verified on a homemade LLAE and the experimental results showed that the proposed TS parameter recognition algorithm only produces an average error of 3.73\(^\circ \) in multi-terrain environments. The defined terrain parameters can meet the control requirements of LLAE in urban multi-terrain environments. The proposed TS parameter recognition algorithm could facilitate the optimization of the adaptive gait control of the exoskeleton system and improve user experience, energy efficiency, and overall comfort.
期刊介绍:
Complex & Intelligent Systems aims to provide a forum for presenting and discussing novel approaches, tools and techniques meant for attaining a cross-fertilization between the broad fields of complex systems, computational simulation, and intelligent analytics and visualization. The transdisciplinary research that the journal focuses on will expand the boundaries of our understanding by investigating the principles and processes that underlie many of the most profound problems facing society today.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
