{"title":"基于替代极电解水技术的强大而快速的毫米级软气动执行器","authors":"Hadi Kolivand, Azita Souri, Arash Ahmadi","doi":"10.1007/s41315-023-00307-w","DOIUrl":null,"url":null,"abstract":"<p>A new soft pneumatic microactuator based on alternative pole water electrolysis has recently been proposed. In these actuators, a water-based electrolyte is electrolyzed under an alternative current, generating hydrogen/oxygen nanobubbles/microbubbles. These bubbles cause the expansion of the electrolyte, resulting in the displacement of the actuator membrane. These actuators stand out for their lightweight design, cost-effectiveness, high performance, and versatility for various applications. In this paper, a strong and fast millimeter-sized actuator based on alternative pole water electrolysis is proposed. The proposed actuator, electronic driver circuits, and measurement systems is implemented, and some experiments to investigate the actuator’s performance under different conditions, including input variables such as voltage, time, temperature, and mass load are conducted. Our experimental results and comparisons with other actuators demonstrate that the proposed actuator exhibits favorable properties in terms of response time, output mechanical force, reliability, scalability, and simplicity of manufacturing. The versatility of this actuator makes it suitable for a wide range of soft robotics applications, including limb movement and manipulation. Additionally, it has potential medical applications such as microrobotics for navigation in narrow body channels for diagnosis, sampling, drug delivery, and surgery.</p><h3 data-test=\"abstract-sub-heading\">Graphical abstract</h3>\n","PeriodicalId":44563,"journal":{"name":"International Journal of Intelligent Robotics and Applications","volume":"2 1","pages":""},"PeriodicalIF":2.0000,"publicationDate":"2024-01-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A strong and fast millimeter-sized soft pneumatic actuator based on alternative pole water electrolysis\",\"authors\":\"Hadi Kolivand, Azita Souri, Arash Ahmadi\",\"doi\":\"10.1007/s41315-023-00307-w\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>A new soft pneumatic microactuator based on alternative pole water electrolysis has recently been proposed. In these actuators, a water-based electrolyte is electrolyzed under an alternative current, generating hydrogen/oxygen nanobubbles/microbubbles. These bubbles cause the expansion of the electrolyte, resulting in the displacement of the actuator membrane. These actuators stand out for their lightweight design, cost-effectiveness, high performance, and versatility for various applications. In this paper, a strong and fast millimeter-sized actuator based on alternative pole water electrolysis is proposed. The proposed actuator, electronic driver circuits, and measurement systems is implemented, and some experiments to investigate the actuator’s performance under different conditions, including input variables such as voltage, time, temperature, and mass load are conducted. Our experimental results and comparisons with other actuators demonstrate that the proposed actuator exhibits favorable properties in terms of response time, output mechanical force, reliability, scalability, and simplicity of manufacturing. The versatility of this actuator makes it suitable for a wide range of soft robotics applications, including limb movement and manipulation. Additionally, it has potential medical applications such as microrobotics for navigation in narrow body channels for diagnosis, sampling, drug delivery, and surgery.</p><h3 data-test=\\\"abstract-sub-heading\\\">Graphical abstract</h3>\\n\",\"PeriodicalId\":44563,\"journal\":{\"name\":\"International Journal of Intelligent Robotics and Applications\",\"volume\":\"2 1\",\"pages\":\"\"},\"PeriodicalIF\":2.0000,\"publicationDate\":\"2024-01-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Intelligent Robotics and Applications\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s41315-023-00307-w\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Intelligent Robotics and Applications","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s41315-023-00307-w","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
A strong and fast millimeter-sized soft pneumatic actuator based on alternative pole water electrolysis
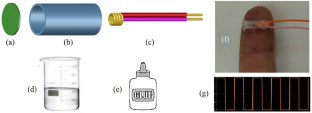
A new soft pneumatic microactuator based on alternative pole water electrolysis has recently been proposed. In these actuators, a water-based electrolyte is electrolyzed under an alternative current, generating hydrogen/oxygen nanobubbles/microbubbles. These bubbles cause the expansion of the electrolyte, resulting in the displacement of the actuator membrane. These actuators stand out for their lightweight design, cost-effectiveness, high performance, and versatility for various applications. In this paper, a strong and fast millimeter-sized actuator based on alternative pole water electrolysis is proposed. The proposed actuator, electronic driver circuits, and measurement systems is implemented, and some experiments to investigate the actuator’s performance under different conditions, including input variables such as voltage, time, temperature, and mass load are conducted. Our experimental results and comparisons with other actuators demonstrate that the proposed actuator exhibits favorable properties in terms of response time, output mechanical force, reliability, scalability, and simplicity of manufacturing. The versatility of this actuator makes it suitable for a wide range of soft robotics applications, including limb movement and manipulation. Additionally, it has potential medical applications such as microrobotics for navigation in narrow body channels for diagnosis, sampling, drug delivery, and surgery.
期刊介绍:
The International Journal of Intelligent Robotics and Applications (IJIRA) fosters the dissemination of new discoveries and novel technologies that advance developments in robotics and their broad applications. This journal provides a publication and communication platform for all robotics topics, from the theoretical fundamentals and technological advances to various applications including manufacturing, space vehicles, biomedical systems and automobiles, data-storage devices, healthcare systems, home appliances, and intelligent highways. IJIRA welcomes contributions from researchers, professionals and industrial practitioners. It publishes original, high-quality and previously unpublished research papers, brief reports, and critical reviews. Specific areas of interest include, but are not limited to:Advanced actuators and sensorsCollective and social robots Computing, communication and controlDesign, modeling and prototypingHuman and robot interactionMachine learning and intelligenceMobile robots and intelligent autonomous systemsMulti-sensor fusion and perceptionPlanning, navigation and localizationRobot intelligence, learning and linguisticsRobotic vision, recognition and reconstructionBio-mechatronics and roboticsCloud and Swarm roboticsCognitive and neuro roboticsExploration and security roboticsHealthcare, medical and assistive roboticsRobotics for intelligent manufacturingService, social and entertainment roboticsSpace and underwater robotsNovel and emerging applications



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
