Achilleas Santi Seisa, Björn Lindqvist, Sumeet Gajanan Satpute, George Nikolakopoulos
{"title":"通过远程非线性模型预测控制实现嵌入式防撞自主空中导航的边缘架构","authors":"Achilleas Santi Seisa, Björn Lindqvist, Sumeet Gajanan Satpute, George Nikolakopoulos","doi":"10.1016/j.jpdc.2024.104849","DOIUrl":null,"url":null,"abstract":"<div><p>In this article, we present an edge-based architecture for enhancing the autonomous capabilities of resource-constrained aerial robots by enabling a remote nonlinear model predictive control scheme, which can be computationally heavy to run on the aerial robots' onboard processors. The nonlinear model predictive control is used to control the trajectory of an unmanned aerial vehicle while detecting, and preventing potential collisions. The proposed edge architecture enables trajectory recalculation for resource-constrained unmanned aerial vehicles in relatively real-time, which will allow them to have fully autonomous behaviors. The architecture is implemented with a remote Kubernetes cluster on the edge side, and it is evaluated on an unmanned aerial vehicle as our controllable robot, while the robotic operating system is used for managing the source codes, and overall communication. With the utilization of edge computing and the architecture presented in this work, we can overcome computational limitations, that resource-constrained robots have, and provide or improve features that are essential for autonomous missions. At the same time, we can minimize the relative travel time delays for time-critical missions over the edge, in comparison to the cloud. We investigate the validity of this hypothesis by evaluating the system's behavior through a series of experiments by utilizing either the unmanned aerial vehicle or the edge resources for the collision avoidance mission.</p></div>","PeriodicalId":54775,"journal":{"name":"Journal of Parallel and Distributed Computing","volume":"188 ","pages":"Article 104849"},"PeriodicalIF":4.0000,"publicationDate":"2024-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S0743731524000133/pdfft?md5=169e2b20b28c91c01823d3205e5e5fe7&pid=1-s2.0-S0743731524000133-main.pdf","citationCount":"0","resultStr":"{\"title\":\"An edge architecture for enabling autonomous aerial navigation with embedded collision avoidance through remote nonlinear model predictive control\",\"authors\":\"Achilleas Santi Seisa, Björn Lindqvist, Sumeet Gajanan Satpute, George Nikolakopoulos\",\"doi\":\"10.1016/j.jpdc.2024.104849\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In this article, we present an edge-based architecture for enhancing the autonomous capabilities of resource-constrained aerial robots by enabling a remote nonlinear model predictive control scheme, which can be computationally heavy to run on the aerial robots' onboard processors. The nonlinear model predictive control is used to control the trajectory of an unmanned aerial vehicle while detecting, and preventing potential collisions. The proposed edge architecture enables trajectory recalculation for resource-constrained unmanned aerial vehicles in relatively real-time, which will allow them to have fully autonomous behaviors. The architecture is implemented with a remote Kubernetes cluster on the edge side, and it is evaluated on an unmanned aerial vehicle as our controllable robot, while the robotic operating system is used for managing the source codes, and overall communication. With the utilization of edge computing and the architecture presented in this work, we can overcome computational limitations, that resource-constrained robots have, and provide or improve features that are essential for autonomous missions. At the same time, we can minimize the relative travel time delays for time-critical missions over the edge, in comparison to the cloud. We investigate the validity of this hypothesis by evaluating the system's behavior through a series of experiments by utilizing either the unmanned aerial vehicle or the edge resources for the collision avoidance mission.</p></div>\",\"PeriodicalId\":54775,\"journal\":{\"name\":\"Journal of Parallel and Distributed Computing\",\"volume\":\"188 \",\"pages\":\"Article 104849\"},\"PeriodicalIF\":4.0000,\"publicationDate\":\"2024-06-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S0743731524000133/pdfft?md5=169e2b20b28c91c01823d3205e5e5fe7&pid=1-s2.0-S0743731524000133-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Parallel and Distributed Computing\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0743731524000133\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/1/29 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, THEORY & METHODS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Parallel and Distributed Computing","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0743731524000133","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/29 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"COMPUTER SCIENCE, THEORY & METHODS","Score":null,"Total":0}
An edge architecture for enabling autonomous aerial navigation with embedded collision avoidance through remote nonlinear model predictive control
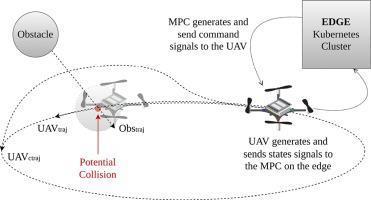
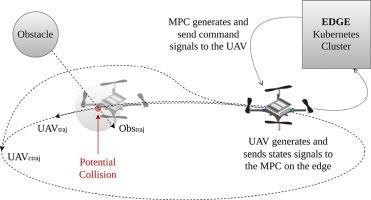
In this article, we present an edge-based architecture for enhancing the autonomous capabilities of resource-constrained aerial robots by enabling a remote nonlinear model predictive control scheme, which can be computationally heavy to run on the aerial robots' onboard processors. The nonlinear model predictive control is used to control the trajectory of an unmanned aerial vehicle while detecting, and preventing potential collisions. The proposed edge architecture enables trajectory recalculation for resource-constrained unmanned aerial vehicles in relatively real-time, which will allow them to have fully autonomous behaviors. The architecture is implemented with a remote Kubernetes cluster on the edge side, and it is evaluated on an unmanned aerial vehicle as our controllable robot, while the robotic operating system is used for managing the source codes, and overall communication. With the utilization of edge computing and the architecture presented in this work, we can overcome computational limitations, that resource-constrained robots have, and provide or improve features that are essential for autonomous missions. At the same time, we can minimize the relative travel time delays for time-critical missions over the edge, in comparison to the cloud. We investigate the validity of this hypothesis by evaluating the system's behavior through a series of experiments by utilizing either the unmanned aerial vehicle or the edge resources for the collision avoidance mission.
期刊介绍:
This international journal is directed to researchers, engineers, educators, managers, programmers, and users of computers who have particular interests in parallel processing and/or distributed computing.
The Journal of Parallel and Distributed Computing publishes original research papers and timely review articles on the theory, design, evaluation, and use of parallel and/or distributed computing systems. The journal also features special issues on these topics; again covering the full range from the design to the use of our targeted systems.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
