{"title":"通过基于图形的指导策略关联无人机系统图像,从运动中提升结构","authors":"Min-Lung Cheng, Yuji Fujita, Yasutaka Kuramoto, Hiroyuki Miura, Masashi Matsuoka","doi":"10.1111/phor.12479","DOIUrl":null,"url":null,"abstract":"Structure from motion (SfM) using optical images has been an important prerequisite for reconstructing three-dimensional (3D) landforms. Although various algorithms have been developed in the past, they suffer from many image pairs for feature matching and recursive searching for the most suitable image to add to SfM reconstruction. Thus, carrying out SfM is computationally costly. This research proposes a boosting SfM (B-SfM) pipeline containing two phases, indexing graph network (IGN) and graph tracking, to accelerate SfM reconstruction. The IGN intends to form image pairs presenting desirable spatial correlation to reduce the time costs spent for feature matching. Building on the IGN, graph tracking integrates ant colony optimisation and greedy sorting algorithms to encode an optimum image sequence to boost SfM reconstruction. Compared to the results derived from other available means, the experimental results show that the proposed approach can accelerate the two phases, feature matching and 3D reconstruction, by up to 14 times faster. The quality of the camera poses recovered is retained or even slightly improved. As a result, the developed B-SfM can efficiently achieve SfM reconstruction by suppressing the time cost in the fashion of image pair selection for feature matching and image order determination for more efficient SfM reconstruction.","PeriodicalId":22881,"journal":{"name":"The Photogrammetric Record","volume":"11 1","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2024-02-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Associating UAS images through a graph-based guiding strategy for boosting structure from motion\",\"authors\":\"Min-Lung Cheng, Yuji Fujita, Yasutaka Kuramoto, Hiroyuki Miura, Masashi Matsuoka\",\"doi\":\"10.1111/phor.12479\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Structure from motion (SfM) using optical images has been an important prerequisite for reconstructing three-dimensional (3D) landforms. Although various algorithms have been developed in the past, they suffer from many image pairs for feature matching and recursive searching for the most suitable image to add to SfM reconstruction. Thus, carrying out SfM is computationally costly. This research proposes a boosting SfM (B-SfM) pipeline containing two phases, indexing graph network (IGN) and graph tracking, to accelerate SfM reconstruction. The IGN intends to form image pairs presenting desirable spatial correlation to reduce the time costs spent for feature matching. Building on the IGN, graph tracking integrates ant colony optimisation and greedy sorting algorithms to encode an optimum image sequence to boost SfM reconstruction. Compared to the results derived from other available means, the experimental results show that the proposed approach can accelerate the two phases, feature matching and 3D reconstruction, by up to 14 times faster. The quality of the camera poses recovered is retained or even slightly improved. As a result, the developed B-SfM can efficiently achieve SfM reconstruction by suppressing the time cost in the fashion of image pair selection for feature matching and image order determination for more efficient SfM reconstruction.\",\"PeriodicalId\":22881,\"journal\":{\"name\":\"The Photogrammetric Record\",\"volume\":\"11 1\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2024-02-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"The Photogrammetric Record\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1111/phor.12479\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"The Photogrammetric Record","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1111/phor.12479","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Associating UAS images through a graph-based guiding strategy for boosting structure from motion
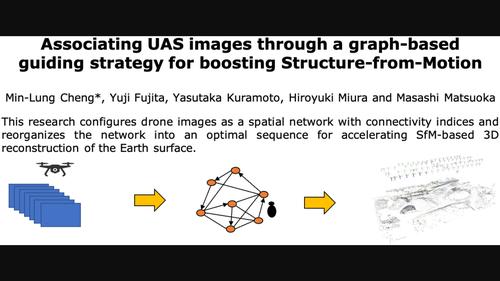
Structure from motion (SfM) using optical images has been an important prerequisite for reconstructing three-dimensional (3D) landforms. Although various algorithms have been developed in the past, they suffer from many image pairs for feature matching and recursive searching for the most suitable image to add to SfM reconstruction. Thus, carrying out SfM is computationally costly. This research proposes a boosting SfM (B-SfM) pipeline containing two phases, indexing graph network (IGN) and graph tracking, to accelerate SfM reconstruction. The IGN intends to form image pairs presenting desirable spatial correlation to reduce the time costs spent for feature matching. Building on the IGN, graph tracking integrates ant colony optimisation and greedy sorting algorithms to encode an optimum image sequence to boost SfM reconstruction. Compared to the results derived from other available means, the experimental results show that the proposed approach can accelerate the two phases, feature matching and 3D reconstruction, by up to 14 times faster. The quality of the camera poses recovered is retained or even slightly improved. As a result, the developed B-SfM can efficiently achieve SfM reconstruction by suppressing the time cost in the fashion of image pair selection for feature matching and image order determination for more efficient SfM reconstruction.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
