{"title":"声波诡计:声音诱发机器人动作感知和预测中的虚幻失真","authors":"Joel Currie, Maria Elena Giannaccini, Patric Bach","doi":"10.1007/s12369-024-01105-5","DOIUrl":null,"url":null,"abstract":"<p>For efficient human–robot interaction, human operators need to be able to efficiently represent the robot’s movements in space and predict its next steps. However, according to frameworks of Bayesian multisensory integration, features outside the motion itself—like the sounds a robot makes while it moves—should affect how otherwise identical motions are perceived. Here, we translate an established psychophysical task from experimental psychology to a human–robot interaction context, which can measure these distortions to motion perception. In two series of preregistered studies, participants watched a humanoid robot make forward and backward reaching movements. When the robot hand suddenly disappeared, they reported its last seen location, either with the mouse cursor (Experiment 1a and 1b) or by matching it to probe stimuli in different locations (Experiment 2a and 2b). The results revealed that even small changes to the robot’s sound robustly affect participants’ visuospatial representation of its motions, so that the motion appeared to extend further in space when accompanied by slightly (100 ms) longer sounds compared to slightly shorter sounds (100 ms shorter). Moreover, these sound changes do not only affect where people currently locate the robot’s motion, but where they anticipate its future steps. These findings show that sound design is an effective medium for manipulating how people represent otherwise identical robot actions and coordinate its interactions with it. The study acts as proof of concept that psychophysical tasks provide a promising tool to measure how design parameters influence the perception and prediction of robot motion.</p>","PeriodicalId":14361,"journal":{"name":"International Journal of Social Robotics","volume":"23 1","pages":""},"PeriodicalIF":4.6000,"publicationDate":"2024-02-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Sonic Sleight of Hand: Sound Induces Illusory Distortions in the Perception and Prediction of Robot Action\",\"authors\":\"Joel Currie, Maria Elena Giannaccini, Patric Bach\",\"doi\":\"10.1007/s12369-024-01105-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>For efficient human–robot interaction, human operators need to be able to efficiently represent the robot’s movements in space and predict its next steps. However, according to frameworks of Bayesian multisensory integration, features outside the motion itself—like the sounds a robot makes while it moves—should affect how otherwise identical motions are perceived. Here, we translate an established psychophysical task from experimental psychology to a human–robot interaction context, which can measure these distortions to motion perception. In two series of preregistered studies, participants watched a humanoid robot make forward and backward reaching movements. When the robot hand suddenly disappeared, they reported its last seen location, either with the mouse cursor (Experiment 1a and 1b) or by matching it to probe stimuli in different locations (Experiment 2a and 2b). The results revealed that even small changes to the robot’s sound robustly affect participants’ visuospatial representation of its motions, so that the motion appeared to extend further in space when accompanied by slightly (100 ms) longer sounds compared to slightly shorter sounds (100 ms shorter). Moreover, these sound changes do not only affect where people currently locate the robot’s motion, but where they anticipate its future steps. These findings show that sound design is an effective medium for manipulating how people represent otherwise identical robot actions and coordinate its interactions with it. The study acts as proof of concept that psychophysical tasks provide a promising tool to measure how design parameters influence the perception and prediction of robot motion.</p>\",\"PeriodicalId\":14361,\"journal\":{\"name\":\"International Journal of Social Robotics\",\"volume\":\"23 1\",\"pages\":\"\"},\"PeriodicalIF\":4.6000,\"publicationDate\":\"2024-02-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Social Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s12369-024-01105-5\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Social Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s12369-024-01105-5","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
Sonic Sleight of Hand: Sound Induces Illusory Distortions in the Perception and Prediction of Robot Action
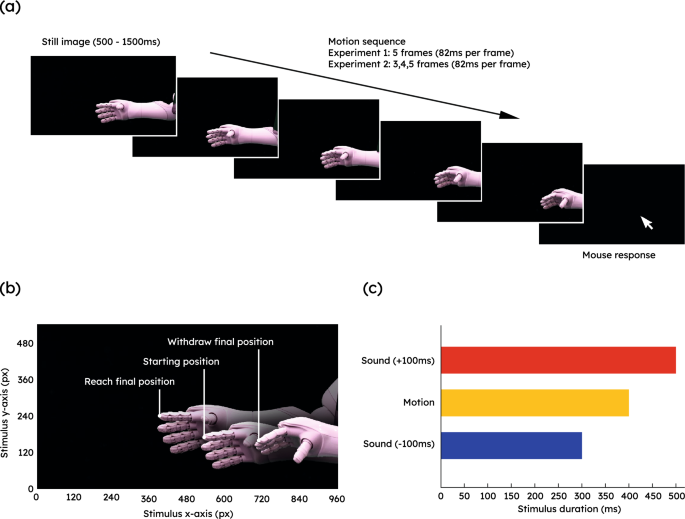
For efficient human–robot interaction, human operators need to be able to efficiently represent the robot’s movements in space and predict its next steps. However, according to frameworks of Bayesian multisensory integration, features outside the motion itself—like the sounds a robot makes while it moves—should affect how otherwise identical motions are perceived. Here, we translate an established psychophysical task from experimental psychology to a human–robot interaction context, which can measure these distortions to motion perception. In two series of preregistered studies, participants watched a humanoid robot make forward and backward reaching movements. When the robot hand suddenly disappeared, they reported its last seen location, either with the mouse cursor (Experiment 1a and 1b) or by matching it to probe stimuli in different locations (Experiment 2a and 2b). The results revealed that even small changes to the robot’s sound robustly affect participants’ visuospatial representation of its motions, so that the motion appeared to extend further in space when accompanied by slightly (100 ms) longer sounds compared to slightly shorter sounds (100 ms shorter). Moreover, these sound changes do not only affect where people currently locate the robot’s motion, but where they anticipate its future steps. These findings show that sound design is an effective medium for manipulating how people represent otherwise identical robot actions and coordinate its interactions with it. The study acts as proof of concept that psychophysical tasks provide a promising tool to measure how design parameters influence the perception and prediction of robot motion.
期刊介绍:
Social Robotics is the study of robots that are able to interact and communicate among themselves, with humans, and with the environment, within the social and cultural structure attached to its role. The journal covers a broad spectrum of topics related to the latest technologies, new research results and developments in the area of social robotics on all levels, from developments in core enabling technologies to system integration, aesthetic design, applications and social implications. It provides a platform for like-minded researchers to present their findings and latest developments in social robotics, covering relevant advances in engineering, computing, arts and social sciences.
The journal publishes original, peer reviewed articles and contributions on innovative ideas and concepts, new discoveries and improvements, as well as novel applications, by leading researchers and developers regarding the latest fundamental advances in the core technologies that form the backbone of social robotics, distinguished developmental projects in the area, as well as seminal works in aesthetic design, ethics and philosophy, studies on social impact and influence, pertaining to social robotics.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
