{"title":"用于改善下肢辅助的多中心膝关节外骨骼的拟人化设计与控制","authors":"Rwittik Barkataki, Zahnupriya Kalita, Sushen Kirtania","doi":"10.1007/s11370-024-00512-x","DOIUrl":null,"url":null,"abstract":"<p>Around one billion people (15% of the global population) suffer from impairments such as muscular weakness, partial or complete paralysis, and lack of assistance in their lower extremities. As a result, robotic devices such as the exoskeleton are used to assist paralysed patients with their day-to-day tasks, aid in neuro-rehabilitation, and enhance the mobility of the user, simultaneously. In this paper, the design and control of a lower extremity exoskeleton with a polycentric knee joint, named as EXXON is presented. It is designed in a way such that it can provide assistance to paralytic patients for performing daily tasks and improve their quality of life and to aid faster and better rehabilitation. Based on the degrees of freedom (DOF) and range of motion of the human lower limb joints, the joints of EXXON has been designed. EXXON has a total 10 DOF at both of its limbs: both active hip flexion/extension and adduction/abduction, active knee flexion/extension, active ankle dorsiflexion/plantarflexion and passive inversion/eversion. The knee joint of EXXON is designed to be a polycentric joint so that it can mimic the moving centrode of anatomical knee. For this, a double 4-bar mechanism is designed. The first 4-bar is for tracing the trajectory of the anatomical knee while the second one is for transmitting the torque to the first 4-bar from the knee actuator. A dynamic model of EXXON has been developed for its controlling. A Computed Torque Controller is designed to simulate the dynamic model of EXXON, such that its joints can track the desired gait trajectories. Simulation results with the developed controller are also presented.</p>","PeriodicalId":48813,"journal":{"name":"Intelligent Service Robotics","volume":"97 1","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2024-02-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Anthropomorphic design and control of a polycentric knee exoskeleton for improved lower limb assistance\",\"authors\":\"Rwittik Barkataki, Zahnupriya Kalita, Sushen Kirtania\",\"doi\":\"10.1007/s11370-024-00512-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Around one billion people (15% of the global population) suffer from impairments such as muscular weakness, partial or complete paralysis, and lack of assistance in their lower extremities. As a result, robotic devices such as the exoskeleton are used to assist paralysed patients with their day-to-day tasks, aid in neuro-rehabilitation, and enhance the mobility of the user, simultaneously. In this paper, the design and control of a lower extremity exoskeleton with a polycentric knee joint, named as EXXON is presented. It is designed in a way such that it can provide assistance to paralytic patients for performing daily tasks and improve their quality of life and to aid faster and better rehabilitation. Based on the degrees of freedom (DOF) and range of motion of the human lower limb joints, the joints of EXXON has been designed. EXXON has a total 10 DOF at both of its limbs: both active hip flexion/extension and adduction/abduction, active knee flexion/extension, active ankle dorsiflexion/plantarflexion and passive inversion/eversion. The knee joint of EXXON is designed to be a polycentric joint so that it can mimic the moving centrode of anatomical knee. For this, a double 4-bar mechanism is designed. The first 4-bar is for tracing the trajectory of the anatomical knee while the second one is for transmitting the torque to the first 4-bar from the knee actuator. A dynamic model of EXXON has been developed for its controlling. A Computed Torque Controller is designed to simulate the dynamic model of EXXON, such that its joints can track the desired gait trajectories. Simulation results with the developed controller are also presented.</p>\",\"PeriodicalId\":48813,\"journal\":{\"name\":\"Intelligent Service Robotics\",\"volume\":\"97 1\",\"pages\":\"\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2024-02-14\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Intelligent Service Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11370-024-00512-x\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Intelligent Service Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11370-024-00512-x","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
Anthropomorphic design and control of a polycentric knee exoskeleton for improved lower limb assistance
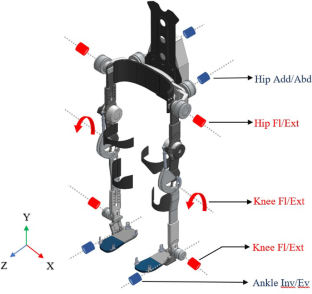
Around one billion people (15% of the global population) suffer from impairments such as muscular weakness, partial or complete paralysis, and lack of assistance in their lower extremities. As a result, robotic devices such as the exoskeleton are used to assist paralysed patients with their day-to-day tasks, aid in neuro-rehabilitation, and enhance the mobility of the user, simultaneously. In this paper, the design and control of a lower extremity exoskeleton with a polycentric knee joint, named as EXXON is presented. It is designed in a way such that it can provide assistance to paralytic patients for performing daily tasks and improve their quality of life and to aid faster and better rehabilitation. Based on the degrees of freedom (DOF) and range of motion of the human lower limb joints, the joints of EXXON has been designed. EXXON has a total 10 DOF at both of its limbs: both active hip flexion/extension and adduction/abduction, active knee flexion/extension, active ankle dorsiflexion/plantarflexion and passive inversion/eversion. The knee joint of EXXON is designed to be a polycentric joint so that it can mimic the moving centrode of anatomical knee. For this, a double 4-bar mechanism is designed. The first 4-bar is for tracing the trajectory of the anatomical knee while the second one is for transmitting the torque to the first 4-bar from the knee actuator. A dynamic model of EXXON has been developed for its controlling. A Computed Torque Controller is designed to simulate the dynamic model of EXXON, such that its joints can track the desired gait trajectories. Simulation results with the developed controller are also presented.
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
