{"title":"基于改进型星形算法和 SVR 组合的果园行列自主导航方法","authors":"Minghui Wang, Jian Xu, Jin Zhang, Yongjie Cui","doi":"10.1007/s11119-024-10118-z","DOIUrl":null,"url":null,"abstract":"<p>Autonomous robot-based orchard operations will become an alternative solution in the field of precision agriculture. One of the keys to robotic work is to achieve autonomous navigation that is as accurate as possible to ensure the most accurate working effect. In this work, we propose an orchard path fitting and navigation method based on the fusion of improved A-Star algorithm and Support Vector Machine Regression (SVR) to meet the requirements of autonomous navigation crawler platform for autonomous navigation in orchard environment and ensure accuracy. In this study, the actual speed and turning radius of the left and right tracks of the crawler platform were collected under 5 different slopes and 400 sets of different theoretical speed combinations of left and right tracks through the design nesting test, and the motion model of the crawler platform was constructed based on SVR. Orchard point cloud data were obtained by 3D solid-state LiDAR, and the improved A-star algorithm was used to fit the navigation path and calculate the turning curvature radius. Taking this curvature radius as the optimal navigation target value, the motion model predicts the optimal theoretical speed of left and right tracks, which is used as a reference for autonomous navigation. The comparison experiment of autonomous navigation was carried out in two modes: traditional and improved A-Star algorithm. The results show that the average values of the maximum lateral and longitudinal deviation of the improved automatic navigation method between orchards row are 6.90 cm and 9.88 cm, respectively. Compared with the method combined with the traditional A-Star algorithm and SVR, the values were 8.94 cm and 10.88 cm and were optimized by 29.57% and 10.12%, respectively. The autonomous navigation method proposed in this paper can meet the needs of orchards rows autonomous navigation, and can be widely applied to different orchard site environments (slope, ground obstacles, bad surface conditions), which can provide reference for the production practices of unmanned orchards.</p>","PeriodicalId":20423,"journal":{"name":"Precision Agriculture","volume":"13 1","pages":""},"PeriodicalIF":6.6000,"publicationDate":"2024-02-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"An autonomous navigation method for orchard rows based on a combination of an improved a-star algorithm and SVR\",\"authors\":\"Minghui Wang, Jian Xu, Jin Zhang, Yongjie Cui\",\"doi\":\"10.1007/s11119-024-10118-z\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Autonomous robot-based orchard operations will become an alternative solution in the field of precision agriculture. One of the keys to robotic work is to achieve autonomous navigation that is as accurate as possible to ensure the most accurate working effect. In this work, we propose an orchard path fitting and navigation method based on the fusion of improved A-Star algorithm and Support Vector Machine Regression (SVR) to meet the requirements of autonomous navigation crawler platform for autonomous navigation in orchard environment and ensure accuracy. In this study, the actual speed and turning radius of the left and right tracks of the crawler platform were collected under 5 different slopes and 400 sets of different theoretical speed combinations of left and right tracks through the design nesting test, and the motion model of the crawler platform was constructed based on SVR. Orchard point cloud data were obtained by 3D solid-state LiDAR, and the improved A-star algorithm was used to fit the navigation path and calculate the turning curvature radius. Taking this curvature radius as the optimal navigation target value, the motion model predicts the optimal theoretical speed of left and right tracks, which is used as a reference for autonomous navigation. The comparison experiment of autonomous navigation was carried out in two modes: traditional and improved A-Star algorithm. The results show that the average values of the maximum lateral and longitudinal deviation of the improved automatic navigation method between orchards row are 6.90 cm and 9.88 cm, respectively. Compared with the method combined with the traditional A-Star algorithm and SVR, the values were 8.94 cm and 10.88 cm and were optimized by 29.57% and 10.12%, respectively. The autonomous navigation method proposed in this paper can meet the needs of orchards rows autonomous navigation, and can be widely applied to different orchard site environments (slope, ground obstacles, bad surface conditions), which can provide reference for the production practices of unmanned orchards.</p>\",\"PeriodicalId\":20423,\"journal\":{\"name\":\"Precision Agriculture\",\"volume\":\"13 1\",\"pages\":\"\"},\"PeriodicalIF\":6.6000,\"publicationDate\":\"2024-02-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Precision Agriculture\",\"FirstCategoryId\":\"97\",\"ListUrlMain\":\"https://doi.org/10.1007/s11119-024-10118-z\",\"RegionNum\":2,\"RegionCategory\":\"农林科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"AGRICULTURE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Precision Agriculture","FirstCategoryId":"97","ListUrlMain":"https://doi.org/10.1007/s11119-024-10118-z","RegionNum":2,"RegionCategory":"农林科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AGRICULTURE, MULTIDISCIPLINARY","Score":null,"Total":0}
An autonomous navigation method for orchard rows based on a combination of an improved a-star algorithm and SVR
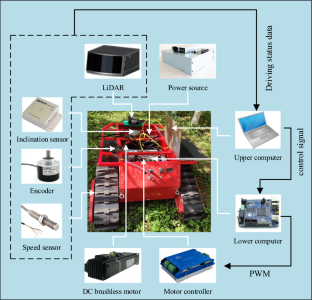
Autonomous robot-based orchard operations will become an alternative solution in the field of precision agriculture. One of the keys to robotic work is to achieve autonomous navigation that is as accurate as possible to ensure the most accurate working effect. In this work, we propose an orchard path fitting and navigation method based on the fusion of improved A-Star algorithm and Support Vector Machine Regression (SVR) to meet the requirements of autonomous navigation crawler platform for autonomous navigation in orchard environment and ensure accuracy. In this study, the actual speed and turning radius of the left and right tracks of the crawler platform were collected under 5 different slopes and 400 sets of different theoretical speed combinations of left and right tracks through the design nesting test, and the motion model of the crawler platform was constructed based on SVR. Orchard point cloud data were obtained by 3D solid-state LiDAR, and the improved A-star algorithm was used to fit the navigation path and calculate the turning curvature radius. Taking this curvature radius as the optimal navigation target value, the motion model predicts the optimal theoretical speed of left and right tracks, which is used as a reference for autonomous navigation. The comparison experiment of autonomous navigation was carried out in two modes: traditional and improved A-Star algorithm. The results show that the average values of the maximum lateral and longitudinal deviation of the improved automatic navigation method between orchards row are 6.90 cm and 9.88 cm, respectively. Compared with the method combined with the traditional A-Star algorithm and SVR, the values were 8.94 cm and 10.88 cm and were optimized by 29.57% and 10.12%, respectively. The autonomous navigation method proposed in this paper can meet the needs of orchards rows autonomous navigation, and can be widely applied to different orchard site environments (slope, ground obstacles, bad surface conditions), which can provide reference for the production practices of unmanned orchards.
期刊介绍:
Precision Agriculture promotes the most innovative results coming from the research in the field of precision agriculture. It provides an effective forum for disseminating original and fundamental research and experience in the rapidly advancing area of precision farming.
There are many topics in the field of precision agriculture; therefore, the topics that are addressed include, but are not limited to:
Natural Resources Variability: Soil and landscape variability, digital elevation models, soil mapping, geostatistics, geographic information systems, microclimate, weather forecasting, remote sensing, management units, scale, etc.
Managing Variability: Sampling techniques, site-specific nutrient and crop protection chemical recommendation, crop quality, tillage, seed density, seed variety, yield mapping, remote sensing, record keeping systems, data interpretation and use, crops (corn, wheat, sugar beets, potatoes, peanut, cotton, vegetables, etc.), management scale, etc.
Engineering Technology: Computers, positioning systems, DGPS, machinery, tillage, planting, nutrient and crop protection implements, manure, irrigation, fertigation, yield monitor and mapping, soil physical and chemical characteristic sensors, weed/pest mapping, etc.
Profitability: MEY, net returns, BMPs, optimum recommendations, crop quality, technology cost, sustainability, social impacts, marketing, cooperatives, farm scale, crop type, etc.
Environment: Nutrient, crop protection chemicals, sediments, leaching, runoff, practices, field, watershed, on/off farm, artificial drainage, ground water, surface water, etc.
Technology Transfer: Skill needs, education, training, outreach, methods, surveys, agri-business, producers, distance education, Internet, simulations models, decision support systems, expert systems, on-farm experimentation, partnerships, quality of rural life, etc.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
