{"title":"PCR-DAT:通过距离和高斯分布实现激光雷达惯性里程测量的新点云注册方法","authors":"XiaoSong Wang, YuChen He, XianQi Cai, Wei Li","doi":"10.1007/s11370-024-00517-6","DOIUrl":null,"url":null,"abstract":"<p>We propose a novel point cloud alignment algorithm, namely PCR-DAT, for radar inertial ranging and localization. In environments with complex feature variations, the distribution trend of features is always changing, and the traditional alignment algorithms often fall into local optimums when dealing with regional point clouds with a combination of rich and sparse feature points, thus affecting the accuracy and stability of point cloud alignment. This paper addresses this issue by constructing a cost function composed of distance factors obtained from lidar measurements, normal distribution factors, and IMU pre-integration measurement factors. The core idea involves analyzing and classifying features in the target environment, defining different residual factors based on feature categories. Sparse features correspond to distance factors, while rich features correspond to distribution factors. Subsequently, a nonlinear optimization process is employed to estimate the robot’s pose. We evaluate the accuracy and robustness of the algorithm in various scenarios, including experiments on the KITTI dataset and field data collected during UGV movement. The results demonstrate that the DAT point cloud registration algorithm effectively addresses the pose prediction problem in the presence of feature degradation.</p>","PeriodicalId":48813,"journal":{"name":"Intelligent Service Robotics","volume":"22 1","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2024-02-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"PCR-DAT: a new point cloud registration method for lidar inertial odometry via distance and Gauss distributed\",\"authors\":\"XiaoSong Wang, YuChen He, XianQi Cai, Wei Li\",\"doi\":\"10.1007/s11370-024-00517-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>We propose a novel point cloud alignment algorithm, namely PCR-DAT, for radar inertial ranging and localization. In environments with complex feature variations, the distribution trend of features is always changing, and the traditional alignment algorithms often fall into local optimums when dealing with regional point clouds with a combination of rich and sparse feature points, thus affecting the accuracy and stability of point cloud alignment. This paper addresses this issue by constructing a cost function composed of distance factors obtained from lidar measurements, normal distribution factors, and IMU pre-integration measurement factors. The core idea involves analyzing and classifying features in the target environment, defining different residual factors based on feature categories. Sparse features correspond to distance factors, while rich features correspond to distribution factors. Subsequently, a nonlinear optimization process is employed to estimate the robot’s pose. We evaluate the accuracy and robustness of the algorithm in various scenarios, including experiments on the KITTI dataset and field data collected during UGV movement. The results demonstrate that the DAT point cloud registration algorithm effectively addresses the pose prediction problem in the presence of feature degradation.</p>\",\"PeriodicalId\":48813,\"journal\":{\"name\":\"Intelligent Service Robotics\",\"volume\":\"22 1\",\"pages\":\"\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2024-02-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Intelligent Service Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11370-024-00517-6\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Intelligent Service Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11370-024-00517-6","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
PCR-DAT: a new point cloud registration method for lidar inertial odometry via distance and Gauss distributed
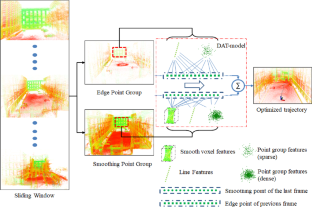
We propose a novel point cloud alignment algorithm, namely PCR-DAT, for radar inertial ranging and localization. In environments with complex feature variations, the distribution trend of features is always changing, and the traditional alignment algorithms often fall into local optimums when dealing with regional point clouds with a combination of rich and sparse feature points, thus affecting the accuracy and stability of point cloud alignment. This paper addresses this issue by constructing a cost function composed of distance factors obtained from lidar measurements, normal distribution factors, and IMU pre-integration measurement factors. The core idea involves analyzing and classifying features in the target environment, defining different residual factors based on feature categories. Sparse features correspond to distance factors, while rich features correspond to distribution factors. Subsequently, a nonlinear optimization process is employed to estimate the robot’s pose. We evaluate the accuracy and robustness of the algorithm in various scenarios, including experiments on the KITTI dataset and field data collected during UGV movement. The results demonstrate that the DAT point cloud registration algorithm effectively addresses the pose prediction problem in the presence of feature degradation.
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
