Kexin Ding, Xueliang Zhang, Yurong Nan, Min Zhuang
{"title":"具有时变状态约束的非线性系统的固定时间自适应模糊控制","authors":"Kexin Ding, Xueliang Zhang, Yurong Nan, Min Zhuang","doi":"10.3103/S014641162401005X","DOIUrl":null,"url":null,"abstract":"<p>In this paper, a fixed-time adaptive fuzzy control scheme is investigated to stabilize a class of uncertain nonlinear systems with full-state constraints. A novel secant barrier Lyapunov function (SBLF) is first constructed to design the controller and obtain the fixed-time stability properties by using the (SBLF) in the design process of back-stepping. The adaptive controller is presented to guarantee that the tracking errors of the system can converge into the neighborhood around the equilibrium point in a fixed time and all the system states can be restricted within the predefined time-varying boundaries. By making use of Lyapunov analysis, we can prove that all the signals in the closed loop system are uniformly ultimately bounded and the output is well driven to follow the desired trajectory. Finally, simulations are given to verify the effectiveness of the method.</p>","PeriodicalId":46238,"journal":{"name":"AUTOMATIC CONTROL AND COMPUTER SCIENCES","volume":"58 1","pages":"43 - 57"},"PeriodicalIF":0.5000,"publicationDate":"2024-03-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Fixed Time Adaptive Fuzzy Control of Nonlinear Systems with Time-Varying State Constraints\",\"authors\":\"Kexin Ding, Xueliang Zhang, Yurong Nan, Min Zhuang\",\"doi\":\"10.3103/S014641162401005X\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In this paper, a fixed-time adaptive fuzzy control scheme is investigated to stabilize a class of uncertain nonlinear systems with full-state constraints. A novel secant barrier Lyapunov function (SBLF) is first constructed to design the controller and obtain the fixed-time stability properties by using the (SBLF) in the design process of back-stepping. The adaptive controller is presented to guarantee that the tracking errors of the system can converge into the neighborhood around the equilibrium point in a fixed time and all the system states can be restricted within the predefined time-varying boundaries. By making use of Lyapunov analysis, we can prove that all the signals in the closed loop system are uniformly ultimately bounded and the output is well driven to follow the desired trajectory. Finally, simulations are given to verify the effectiveness of the method.</p>\",\"PeriodicalId\":46238,\"journal\":{\"name\":\"AUTOMATIC CONTROL AND COMPUTER SCIENCES\",\"volume\":\"58 1\",\"pages\":\"43 - 57\"},\"PeriodicalIF\":0.5000,\"publicationDate\":\"2024-03-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"AUTOMATIC CONTROL AND COMPUTER SCIENCES\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.3103/S014641162401005X\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"AUTOMATIC CONTROL AND COMPUTER SCIENCES","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.3103/S014641162401005X","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Fixed Time Adaptive Fuzzy Control of Nonlinear Systems with Time-Varying State Constraints
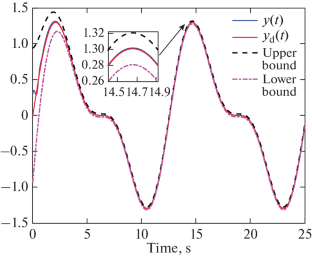
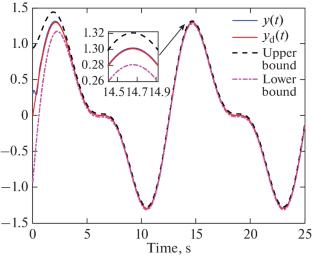
In this paper, a fixed-time adaptive fuzzy control scheme is investigated to stabilize a class of uncertain nonlinear systems with full-state constraints. A novel secant barrier Lyapunov function (SBLF) is first constructed to design the controller and obtain the fixed-time stability properties by using the (SBLF) in the design process of back-stepping. The adaptive controller is presented to guarantee that the tracking errors of the system can converge into the neighborhood around the equilibrium point in a fixed time and all the system states can be restricted within the predefined time-varying boundaries. By making use of Lyapunov analysis, we can prove that all the signals in the closed loop system are uniformly ultimately bounded and the output is well driven to follow the desired trajectory. Finally, simulations are given to verify the effectiveness of the method.
期刊介绍:
Automatic Control and Computer Sciences is a peer reviewed journal that publishes articles on• Control systems, cyber-physical system, real-time systems, robotics, smart sensors, embedded intelligence • Network information technologies, information security, statistical methods of data processing, distributed artificial intelligence, complex systems modeling, knowledge representation, processing and management • Signal and image processing, machine learning, machine perception, computer vision



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
