{"title":"水下图像的自适应插值和三维重建算法","authors":"Zhijie Tang, Congqi Xu, Siyu Yan","doi":"10.1007/s00138-024-01518-2","DOIUrl":null,"url":null,"abstract":"<p>3D reconstruction technology is gradually applied to underwater scenes, which has become a crucial research direction for human ocean exploration and exploitation. However, due to the complexity of the underwater environment, the number of high-quality underwater images acquired by underwater robots is limited and cannot meet the requirements of 3D reconstruction. Therefore, this paper proposes an adaptive 3D reconstruction algorithm for underwater targets. We apply the frame interpolation technique to underwater 3D reconstruction, an unprecedented technical attempt. In this paper, we design a single-stage large-angle span underwater image interpolation model, which has an excellent enhancement effect on degraded underwater 2D images compared with other methods. Current methods make it challenging to balance the relationship between feature information acquisition and underwater image quality improvement. In this paper, an optimized cascaded feature pyramid scheme and an adaptive bidirectional optical flow estimation algorithm based on underwater NRIQA metrics are proposed and applied to the proposed model to solve the above problems. The intermediate image output from the model improves the image quality and retains the detailed information. Experiments show that the method proposed in this paper outperforms other methods when dealing with several typical degradation types of underwater images. In underwater 3D reconstruction, the intermediate image generated by the model is used as input instead of the degraded image to obtain a denser 3D point cloud and better visualization. Our method is instructive to the problem of acquiring underwater high-quality target images and underwater 3D reconstruction.</p>","PeriodicalId":51116,"journal":{"name":"Machine Vision and Applications","volume":"66 1","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2024-03-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"An adaptive interpolation and 3D reconstruction algorithm for underwater images\",\"authors\":\"Zhijie Tang, Congqi Xu, Siyu Yan\",\"doi\":\"10.1007/s00138-024-01518-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>3D reconstruction technology is gradually applied to underwater scenes, which has become a crucial research direction for human ocean exploration and exploitation. However, due to the complexity of the underwater environment, the number of high-quality underwater images acquired by underwater robots is limited and cannot meet the requirements of 3D reconstruction. Therefore, this paper proposes an adaptive 3D reconstruction algorithm for underwater targets. We apply the frame interpolation technique to underwater 3D reconstruction, an unprecedented technical attempt. In this paper, we design a single-stage large-angle span underwater image interpolation model, which has an excellent enhancement effect on degraded underwater 2D images compared with other methods. Current methods make it challenging to balance the relationship between feature information acquisition and underwater image quality improvement. In this paper, an optimized cascaded feature pyramid scheme and an adaptive bidirectional optical flow estimation algorithm based on underwater NRIQA metrics are proposed and applied to the proposed model to solve the above problems. The intermediate image output from the model improves the image quality and retains the detailed information. Experiments show that the method proposed in this paper outperforms other methods when dealing with several typical degradation types of underwater images. In underwater 3D reconstruction, the intermediate image generated by the model is used as input instead of the degraded image to obtain a denser 3D point cloud and better visualization. Our method is instructive to the problem of acquiring underwater high-quality target images and underwater 3D reconstruction.</p>\",\"PeriodicalId\":51116,\"journal\":{\"name\":\"Machine Vision and Applications\",\"volume\":\"66 1\",\"pages\":\"\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-03-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Machine Vision and Applications\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s00138-024-01518-2\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Machine Vision and Applications","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s00138-024-01518-2","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
An adaptive interpolation and 3D reconstruction algorithm for underwater images
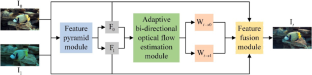
3D reconstruction technology is gradually applied to underwater scenes, which has become a crucial research direction for human ocean exploration and exploitation. However, due to the complexity of the underwater environment, the number of high-quality underwater images acquired by underwater robots is limited and cannot meet the requirements of 3D reconstruction. Therefore, this paper proposes an adaptive 3D reconstruction algorithm for underwater targets. We apply the frame interpolation technique to underwater 3D reconstruction, an unprecedented technical attempt. In this paper, we design a single-stage large-angle span underwater image interpolation model, which has an excellent enhancement effect on degraded underwater 2D images compared with other methods. Current methods make it challenging to balance the relationship between feature information acquisition and underwater image quality improvement. In this paper, an optimized cascaded feature pyramid scheme and an adaptive bidirectional optical flow estimation algorithm based on underwater NRIQA metrics are proposed and applied to the proposed model to solve the above problems. The intermediate image output from the model improves the image quality and retains the detailed information. Experiments show that the method proposed in this paper outperforms other methods when dealing with several typical degradation types of underwater images. In underwater 3D reconstruction, the intermediate image generated by the model is used as input instead of the degraded image to obtain a denser 3D point cloud and better visualization. Our method is instructive to the problem of acquiring underwater high-quality target images and underwater 3D reconstruction.
期刊介绍:
Machine Vision and Applications publishes high-quality technical contributions in machine vision research and development. Specifically, the editors encourage submittals in all applications and engineering aspects of image-related computing. In particular, original contributions dealing with scientific, commercial, industrial, military, and biomedical applications of machine vision, are all within the scope of the journal.
Particular emphasis is placed on engineering and technology aspects of image processing and computer vision.
The following aspects of machine vision applications are of interest: algorithms, architectures, VLSI implementations, AI techniques and expert systems for machine vision, front-end sensing, multidimensional and multisensor machine vision, real-time techniques, image databases, virtual reality and visualization. Papers must include a significant experimental validation component.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
