Zhihong Xu , Senlin Chai , Dongyang Chen , Weijun Wang , Jin Dai , Xiaofeng Zhang , Jianghui Qin , Kai Song , Xinhua Li , Jing Han , Qing Chang , Miaofeng Zhang , Chenxi Xue , Jun Lu , Lidong Wu , Yunfeng Yao , Lan Li , Qing Jiang
{"title":"LANCET 机器人系统可提高全髋关节置换术的手术效率:前瞻性随机、多中心、平行对照临床试验","authors":"Zhihong Xu , Senlin Chai , Dongyang Chen , Weijun Wang , Jin Dai , Xiaofeng Zhang , Jianghui Qin , Kai Song , Xinhua Li , Jing Han , Qing Chang , Miaofeng Zhang , Chenxi Xue , Jun Lu , Lidong Wu , Yunfeng Yao , Lan Li , Qing Jiang","doi":"10.1016/j.jot.2023.12.004","DOIUrl":null,"url":null,"abstract":"<div><h3>Objective</h3><p>To evaluate the accuracy and safety of the LANCET robotic system, a robot arm assisted operation system for total hip arthroplasty via a multicenter clinical randomized controlled trial.</p></div><div><h3>Methods</h3><p>A total of 116 patients were randomized into two groups: LANCET robotic arm assisted THA group (N = 58) and the conventional THA group (N = 58). General information about the patients was collected preoperatively. Operational time and bleeding were recorded during the surgery. The position of the acetabular prosthesis was evaluated by radiographs one week after surgery and compared with preoperative planning. Harris score, hip mobility, prosthesis position and angle and complications were compared between the two groups at three months postoperatively.</p></div><div><h3>Results</h3><p>None of the 111 patients who ultimately completed the 3-month follow-up experienced adverse events such as hip dislocation and infection during follow-up. In the RAA group, 52 (92.9 %) patients were located in the Lewinnek safe zone and 49 (87.5 %) patients were located in the Callanan safe zone. In the control group were 47 (85.5 %) and 44 (80.0 %) patients, respectively. In the RAA group, 53 (94.6 %) patients had a postoperative acetabular inclination angle and 51 (91.1 %) patients had an acetabular version angle within a deviation of 5° from the preoperative plan. These numbers were significantly higher than those of the control group, which consisted of 42 (76.4 %) and 34 (61.8 %) patients respectively. There were no significant differences between the two groups of subjects in terms of general condition, intraoperative bleeding, hip mobility, and adverse complications.</p></div><div><h3>Conclusion</h3><p>The results of this prospective randomized, multicenter, parallel-controlled clinical study demonstrated that the LANCET robotic system leads conventional THA surgery in accuracy of acetabular cup placement and does not differ from conventional THA surgery in terms of postoperative hip functional recovery and complications.</p></div><div><h3>The translational potential of this article</h3><p>In the past, the success rate of total hip arthroplasty (THA) relied heavily on the surgeon's experience. As a result, junior doctors needed extensive training to become proficient in this technique. However, the introduction of surgical robots has significantly improved this situation. By utilizing robotic assistance, both junior and senior doctors can perform THA quickly and efficiently. This advancement is crucial for the widespread adoption of THA, as patients can now receive surgical treatment in local facilities instead of overwhelming larger hospitals and straining medical resources. Moreover, the development of surgical robots with fully independent intellectual property rights holds immense value in overcoming the limitations of high-end medical equipment. This aligns with the objectives outlined in the 14th Five Year Plan for National Science and Technology Strategy.</p></div>","PeriodicalId":16636,"journal":{"name":"Journal of Orthopaedic Translation","volume":"45 ","pages":"Pages 247-255"},"PeriodicalIF":5.9000,"publicationDate":"2024-03-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2214031X23001055/pdfft?md5=f44c0da63c19ab54ffac6cdb70ec2524&pid=1-s2.0-S2214031X23001055-main.pdf","citationCount":"0","resultStr":"{\"title\":\"The LANCET robotic system can improve surgical efficiency in total hip arthroplasty: A prospective randomized, multicenter, parallel-controlled clinical trial\",\"authors\":\"Zhihong Xu , Senlin Chai , Dongyang Chen , Weijun Wang , Jin Dai , Xiaofeng Zhang , Jianghui Qin , Kai Song , Xinhua Li , Jing Han , Qing Chang , Miaofeng Zhang , Chenxi Xue , Jun Lu , Lidong Wu , Yunfeng Yao , Lan Li , Qing Jiang\",\"doi\":\"10.1016/j.jot.2023.12.004\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><h3>Objective</h3><p>To evaluate the accuracy and safety of the LANCET robotic system, a robot arm assisted operation system for total hip arthroplasty via a multicenter clinical randomized controlled trial.</p></div><div><h3>Methods</h3><p>A total of 116 patients were randomized into two groups: LANCET robotic arm assisted THA group (N = 58) and the conventional THA group (N = 58). General information about the patients was collected preoperatively. Operational time and bleeding were recorded during the surgery. The position of the acetabular prosthesis was evaluated by radiographs one week after surgery and compared with preoperative planning. Harris score, hip mobility, prosthesis position and angle and complications were compared between the two groups at three months postoperatively.</p></div><div><h3>Results</h3><p>None of the 111 patients who ultimately completed the 3-month follow-up experienced adverse events such as hip dislocation and infection during follow-up. In the RAA group, 52 (92.9 %) patients were located in the Lewinnek safe zone and 49 (87.5 %) patients were located in the Callanan safe zone. In the control group were 47 (85.5 %) and 44 (80.0 %) patients, respectively. In the RAA group, 53 (94.6 %) patients had a postoperative acetabular inclination angle and 51 (91.1 %) patients had an acetabular version angle within a deviation of 5° from the preoperative plan. These numbers were significantly higher than those of the control group, which consisted of 42 (76.4 %) and 34 (61.8 %) patients respectively. There were no significant differences between the two groups of subjects in terms of general condition, intraoperative bleeding, hip mobility, and adverse complications.</p></div><div><h3>Conclusion</h3><p>The results of this prospective randomized, multicenter, parallel-controlled clinical study demonstrated that the LANCET robotic system leads conventional THA surgery in accuracy of acetabular cup placement and does not differ from conventional THA surgery in terms of postoperative hip functional recovery and complications.</p></div><div><h3>The translational potential of this article</h3><p>In the past, the success rate of total hip arthroplasty (THA) relied heavily on the surgeon's experience. As a result, junior doctors needed extensive training to become proficient in this technique. However, the introduction of surgical robots has significantly improved this situation. By utilizing robotic assistance, both junior and senior doctors can perform THA quickly and efficiently. This advancement is crucial for the widespread adoption of THA, as patients can now receive surgical treatment in local facilities instead of overwhelming larger hospitals and straining medical resources. Moreover, the development of surgical robots with fully independent intellectual property rights holds immense value in overcoming the limitations of high-end medical equipment. This aligns with the objectives outlined in the 14th Five Year Plan for National Science and Technology Strategy.</p></div>\",\"PeriodicalId\":16636,\"journal\":{\"name\":\"Journal of Orthopaedic Translation\",\"volume\":\"45 \",\"pages\":\"Pages 247-255\"},\"PeriodicalIF\":5.9000,\"publicationDate\":\"2024-03-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.sciencedirect.com/science/article/pii/S2214031X23001055/pdfft?md5=f44c0da63c19ab54ffac6cdb70ec2524&pid=1-s2.0-S2214031X23001055-main.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Orthopaedic Translation\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2214031X23001055\",\"RegionNum\":1,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/4/5 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ORTHOPEDICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Orthopaedic Translation","FirstCategoryId":"3","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2214031X23001055","RegionNum":1,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/4/5 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
The LANCET robotic system can improve surgical efficiency in total hip arthroplasty: A prospective randomized, multicenter, parallel-controlled clinical trial
Objective
To evaluate the accuracy and safety of the LANCET robotic system, a robot arm assisted operation system for total hip arthroplasty via a multicenter clinical randomized controlled trial.
Methods
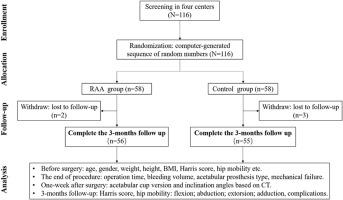
A total of 116 patients were randomized into two groups: LANCET robotic arm assisted THA group (N = 58) and the conventional THA group (N = 58). General information about the patients was collected preoperatively. Operational time and bleeding were recorded during the surgery. The position of the acetabular prosthesis was evaluated by radiographs one week after surgery and compared with preoperative planning. Harris score, hip mobility, prosthesis position and angle and complications were compared between the two groups at three months postoperatively.
Results
None of the 111 patients who ultimately completed the 3-month follow-up experienced adverse events such as hip dislocation and infection during follow-up. In the RAA group, 52 (92.9 %) patients were located in the Lewinnek safe zone and 49 (87.5 %) patients were located in the Callanan safe zone. In the control group were 47 (85.5 %) and 44 (80.0 %) patients, respectively. In the RAA group, 53 (94.6 %) patients had a postoperative acetabular inclination angle and 51 (91.1 %) patients had an acetabular version angle within a deviation of 5° from the preoperative plan. These numbers were significantly higher than those of the control group, which consisted of 42 (76.4 %) and 34 (61.8 %) patients respectively. There were no significant differences between the two groups of subjects in terms of general condition, intraoperative bleeding, hip mobility, and adverse complications.
Conclusion
The results of this prospective randomized, multicenter, parallel-controlled clinical study demonstrated that the LANCET robotic system leads conventional THA surgery in accuracy of acetabular cup placement and does not differ from conventional THA surgery in terms of postoperative hip functional recovery and complications.
The translational potential of this article
In the past, the success rate of total hip arthroplasty (THA) relied heavily on the surgeon's experience. As a result, junior doctors needed extensive training to become proficient in this technique. However, the introduction of surgical robots has significantly improved this situation. By utilizing robotic assistance, both junior and senior doctors can perform THA quickly and efficiently. This advancement is crucial for the widespread adoption of THA, as patients can now receive surgical treatment in local facilities instead of overwhelming larger hospitals and straining medical resources. Moreover, the development of surgical robots with fully independent intellectual property rights holds immense value in overcoming the limitations of high-end medical equipment. This aligns with the objectives outlined in the 14th Five Year Plan for National Science and Technology Strategy.
期刊介绍:
The Journal of Orthopaedic Translation (JOT) is the official peer-reviewed, open access journal of the Chinese Speaking Orthopaedic Society (CSOS) and the International Chinese Musculoskeletal Research Society (ICMRS). It is published quarterly, in January, April, July and October, by Elsevier.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
