Evangelos Koutras, Felipe Moretti Leila, Adrijan Ribaric, Sotirios Natsiavas
{"title":"用于软土地形上轮式车辆多体动态模拟的新型接触和道路模型","authors":"Evangelos Koutras, Felipe Moretti Leila, Adrijan Ribaric, Sotirios Natsiavas","doi":"10.1007/s11044-024-09980-6","DOIUrl":null,"url":null,"abstract":"<p>In this paper, a new high-performance and memory-efficient contact and road model is developed. Specifically, the road is modeled as a rectangular structured grid of deformable springs in the vertical direction, thus enabling fast execution. The new road model stands out due to its ability to handle large road scenarios by allocating computer memory dynamically for each spring, resulting in efficient memory utilization. Furthermore, each spring represents a small road patch that entails various information, such as the soil elevation, the soil properties, and the soil compaction, allowing for complicated simulations incorporating spatially varying soil properties and phenomena related to the multi-pass effect. In addition, using the new contact model, complex terrain geometries are handled in a computationally efficient way by approximating locally the irregular road profile with a suitable equivalent plane. For this, two different strategies are proposed, namely the radial basis function (RBF) interpolation method and the 3D enveloping contact model. Finally, the proposed techniques are implemented in Altair MotionSolve, a comprehensive multi-body simulation software for complex mechanical systems. In particular, a single-wheel test bed is initially examined followed by a four-wheeled rover model and the next-generation NATO reference mobility model (NG-NRMM). In all cases, the proposed model is validated by using available experimental data. Lastly, a case involving both wheeled and tracked vehicles is also examined by using a shared road model.</p>","PeriodicalId":49792,"journal":{"name":"Multibody System Dynamics","volume":"596 1","pages":""},"PeriodicalIF":2.4000,"publicationDate":"2024-04-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A new contact and road model for multi-body dynamic simulation of wheeled vehicles on soft-soil terrain\",\"authors\":\"Evangelos Koutras, Felipe Moretti Leila, Adrijan Ribaric, Sotirios Natsiavas\",\"doi\":\"10.1007/s11044-024-09980-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In this paper, a new high-performance and memory-efficient contact and road model is developed. Specifically, the road is modeled as a rectangular structured grid of deformable springs in the vertical direction, thus enabling fast execution. The new road model stands out due to its ability to handle large road scenarios by allocating computer memory dynamically for each spring, resulting in efficient memory utilization. Furthermore, each spring represents a small road patch that entails various information, such as the soil elevation, the soil properties, and the soil compaction, allowing for complicated simulations incorporating spatially varying soil properties and phenomena related to the multi-pass effect. In addition, using the new contact model, complex terrain geometries are handled in a computationally efficient way by approximating locally the irregular road profile with a suitable equivalent plane. For this, two different strategies are proposed, namely the radial basis function (RBF) interpolation method and the 3D enveloping contact model. Finally, the proposed techniques are implemented in Altair MotionSolve, a comprehensive multi-body simulation software for complex mechanical systems. In particular, a single-wheel test bed is initially examined followed by a four-wheeled rover model and the next-generation NATO reference mobility model (NG-NRMM). In all cases, the proposed model is validated by using available experimental data. Lastly, a case involving both wheeled and tracked vehicles is also examined by using a shared road model.</p>\",\"PeriodicalId\":49792,\"journal\":{\"name\":\"Multibody System Dynamics\",\"volume\":\"596 1\",\"pages\":\"\"},\"PeriodicalIF\":2.4000,\"publicationDate\":\"2024-04-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Multibody System Dynamics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s11044-024-09980-6\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"MECHANICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Multibody System Dynamics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11044-024-09980-6","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MECHANICS","Score":null,"Total":0}
A new contact and road model for multi-body dynamic simulation of wheeled vehicles on soft-soil terrain
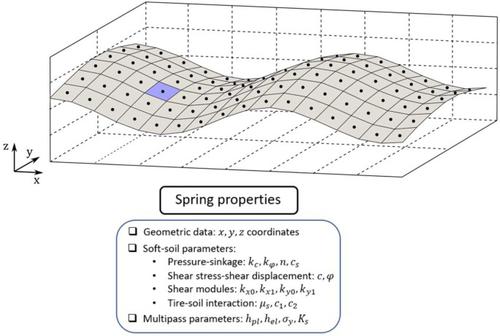
In this paper, a new high-performance and memory-efficient contact and road model is developed. Specifically, the road is modeled as a rectangular structured grid of deformable springs in the vertical direction, thus enabling fast execution. The new road model stands out due to its ability to handle large road scenarios by allocating computer memory dynamically for each spring, resulting in efficient memory utilization. Furthermore, each spring represents a small road patch that entails various information, such as the soil elevation, the soil properties, and the soil compaction, allowing for complicated simulations incorporating spatially varying soil properties and phenomena related to the multi-pass effect. In addition, using the new contact model, complex terrain geometries are handled in a computationally efficient way by approximating locally the irregular road profile with a suitable equivalent plane. For this, two different strategies are proposed, namely the radial basis function (RBF) interpolation method and the 3D enveloping contact model. Finally, the proposed techniques are implemented in Altair MotionSolve, a comprehensive multi-body simulation software for complex mechanical systems. In particular, a single-wheel test bed is initially examined followed by a four-wheeled rover model and the next-generation NATO reference mobility model (NG-NRMM). In all cases, the proposed model is validated by using available experimental data. Lastly, a case involving both wheeled and tracked vehicles is also examined by using a shared road model.
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
