{"title":"基于 CMA-ES 优化算法的简化神经肌肉-骨骼-骨骼模型的前向动力学模拟:框架和案例研究","authors":"Wei Jin, Jiaqi Liu, Qiwei Zhang, Xiaoxu Zhang, Qining Wang, Jian Xu, Hongbin Fang","doi":"10.1007/s11044-024-09982-4","DOIUrl":null,"url":null,"abstract":"<p>The modeling and simulation of coupled neuromusculoskeletal-exoskeletal systems play a crucial role in human biomechanical analysis, as well as in the design and control of exoskeletons. This study incorporates the integration of exoskeleton models into a reflex-based gait model, emphasizing human-exoskeleton interaction. Specifically, we introduce an optimization-based dynamic simulation framework that integrates a neuromusculoskeletal feedback loop, multibody dynamics, human-exoskeleton interaction, and foot-ground contact. The framework advances in human-exoskeleton interaction and muscle reflex model refinement. Without relying on experimental measurements or empirical data, our framework employs a stepwise optimization process to determine muscle reflex parameters, taking into account multidimensional criteria. This allows the framework to generate a full range of kinematic and biomechanical signals, including muscle activations, muscle forces, joint torques, etc., which are typically challenging to measure experimentally. To evaluate the validity of the framework, we compare the simulated results with experimental data obtained from a healthy subject wearing an exoskeleton while walking at different speeds (0.9, 1.0, and 1.1 m/s) and terrains (flat and uphill). The results demonstrate that our framework can capture the qualitative differences in muscle activity associated with different functions, as well as the evolutionary patterns of muscle activity and kinematic signals with respect to varying walking conditions, with the Pearson correlation coefficient R > 0.7. Simulations of the human walking with the exoskeleton in both passive mode and assisting mode at a peak torque of 20 N⋅m are further conducted to investigate the effect of exoskeleton assistance on human biomechanics. The simulation framework we propose has the potential to facilitate gait analysis and performance evaluation of coupled human-exoskeleton systems, as well as enable efficient and cost-effective testing of novel exoskeleton designs and control strategies.</p>","PeriodicalId":49792,"journal":{"name":"Multibody System Dynamics","volume":"40 1","pages":""},"PeriodicalIF":2.6000,"publicationDate":"2024-04-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Forward dynamics simulation of a simplified neuromuscular-skeletal-exoskeletal model based on the CMA-ES optimization algorithm: framework and case studies\",\"authors\":\"Wei Jin, Jiaqi Liu, Qiwei Zhang, Xiaoxu Zhang, Qining Wang, Jian Xu, Hongbin Fang\",\"doi\":\"10.1007/s11044-024-09982-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The modeling and simulation of coupled neuromusculoskeletal-exoskeletal systems play a crucial role in human biomechanical analysis, as well as in the design and control of exoskeletons. This study incorporates the integration of exoskeleton models into a reflex-based gait model, emphasizing human-exoskeleton interaction. Specifically, we introduce an optimization-based dynamic simulation framework that integrates a neuromusculoskeletal feedback loop, multibody dynamics, human-exoskeleton interaction, and foot-ground contact. The framework advances in human-exoskeleton interaction and muscle reflex model refinement. Without relying on experimental measurements or empirical data, our framework employs a stepwise optimization process to determine muscle reflex parameters, taking into account multidimensional criteria. This allows the framework to generate a full range of kinematic and biomechanical signals, including muscle activations, muscle forces, joint torques, etc., which are typically challenging to measure experimentally. To evaluate the validity of the framework, we compare the simulated results with experimental data obtained from a healthy subject wearing an exoskeleton while walking at different speeds (0.9, 1.0, and 1.1 m/s) and terrains (flat and uphill). The results demonstrate that our framework can capture the qualitative differences in muscle activity associated with different functions, as well as the evolutionary patterns of muscle activity and kinematic signals with respect to varying walking conditions, with the Pearson correlation coefficient R > 0.7. Simulations of the human walking with the exoskeleton in both passive mode and assisting mode at a peak torque of 20 N⋅m are further conducted to investigate the effect of exoskeleton assistance on human biomechanics. The simulation framework we propose has the potential to facilitate gait analysis and performance evaluation of coupled human-exoskeleton systems, as well as enable efficient and cost-effective testing of novel exoskeleton designs and control strategies.</p>\",\"PeriodicalId\":49792,\"journal\":{\"name\":\"Multibody System Dynamics\",\"volume\":\"40 1\",\"pages\":\"\"},\"PeriodicalIF\":2.6000,\"publicationDate\":\"2024-04-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Multibody System Dynamics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s11044-024-09982-4\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"MECHANICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Multibody System Dynamics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11044-024-09982-4","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MECHANICS","Score":null,"Total":0}
引用次数: 0
摘要
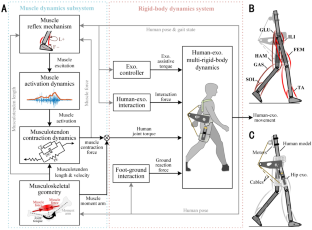
神经-肌肉-骨骼耦合系统的建模和仿真在人体生物力学分析以及外骨骼的设计和控制中发挥着至关重要的作用。本研究将外骨骼模型整合到基于反射的步态模型中,强调人与外骨骼的相互作用。具体来说,我们引入了一个基于优化的动态模拟框架,该框架整合了神经-肌肉-骨骼反馈回路、多体动力学、人体-外骨骼互动以及脚-地面接触。该框架在人-骨架互动和肌肉反射模型完善方面取得了进展。在不依赖实验测量或经验数据的情况下,我们的框架采用逐步优化过程来确定肌肉反射参数,同时考虑到多维标准。这使得该框架能够生成全方位的运动学和生物力学信号,包括肌肉激活、肌肉力、关节扭矩等,而这些信号通常很难通过实验测量。为了评估该框架的有效性,我们将模拟结果与实验数据进行了比较,实验数据是由一名健康受试者在不同速度(0.9、1.0 和 1.1 米/秒)和地形(平地和上坡)下穿着外骨骼行走时获得的。结果表明,我们的框架可以捕捉到与不同功能相关的肌肉活动的定性差异,以及肌肉活动和运动学信号在不同行走条件下的演变模式,皮尔逊相关系数 R > 0.7。为了研究外骨骼辅助对人体生物力学的影响,我们还进一步模拟了在峰值扭矩为 20 牛顿-米的情况下,人体在外骨骼的被动模式和辅助模式下的行走情况。我们提出的模拟框架有可能促进步态分析和人体-外骨骼耦合系统的性能评估,并能对新型外骨骼设计和控制策略进行高效、经济的测试。
Forward dynamics simulation of a simplified neuromuscular-skeletal-exoskeletal model based on the CMA-ES optimization algorithm: framework and case studies
The modeling and simulation of coupled neuromusculoskeletal-exoskeletal systems play a crucial role in human biomechanical analysis, as well as in the design and control of exoskeletons. This study incorporates the integration of exoskeleton models into a reflex-based gait model, emphasizing human-exoskeleton interaction. Specifically, we introduce an optimization-based dynamic simulation framework that integrates a neuromusculoskeletal feedback loop, multibody dynamics, human-exoskeleton interaction, and foot-ground contact. The framework advances in human-exoskeleton interaction and muscle reflex model refinement. Without relying on experimental measurements or empirical data, our framework employs a stepwise optimization process to determine muscle reflex parameters, taking into account multidimensional criteria. This allows the framework to generate a full range of kinematic and biomechanical signals, including muscle activations, muscle forces, joint torques, etc., which are typically challenging to measure experimentally. To evaluate the validity of the framework, we compare the simulated results with experimental data obtained from a healthy subject wearing an exoskeleton while walking at different speeds (0.9, 1.0, and 1.1 m/s) and terrains (flat and uphill). The results demonstrate that our framework can capture the qualitative differences in muscle activity associated with different functions, as well as the evolutionary patterns of muscle activity and kinematic signals with respect to varying walking conditions, with the Pearson correlation coefficient R > 0.7. Simulations of the human walking with the exoskeleton in both passive mode and assisting mode at a peak torque of 20 N⋅m are further conducted to investigate the effect of exoskeleton assistance on human biomechanics. The simulation framework we propose has the potential to facilitate gait analysis and performance evaluation of coupled human-exoskeleton systems, as well as enable efficient and cost-effective testing of novel exoskeleton designs and control strategies.
期刊介绍:
The journal Multibody System Dynamics treats theoretical and computational methods in rigid and flexible multibody systems, their application, and the experimental procedures used to validate the theoretical foundations.
The research reported addresses computational and experimental aspects and their application to classical and emerging fields in science and technology. Both development and application aspects of multibody dynamics are relevant, in particular in the fields of control, optimization, real-time simulation, parallel computation, workspace and path planning, reliability, and durability. The journal also publishes articles covering application fields such as vehicle dynamics, aerospace technology, robotics and mechatronics, machine dynamics, crashworthiness, biomechanics, artificial intelligence, and system identification if they involve or contribute to the field of Multibody System Dynamics.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
