Yuzuru Sambommatsu, Seung Duk Lee, Daisuke Imai, Kush Savsani, Aamir A. Khan, Amit Sharma, Muhammad Saeed, Adrian H. Cotterell, Vinay Kumaran, Marlon F. Levy, David A. Bruno
{"title":"烧推 \"技术:一种新型机器人肝实质横切技术","authors":"Yuzuru Sambommatsu, Seung Duk Lee, Daisuke Imai, Kush Savsani, Aamir A. Khan, Amit Sharma, Muhammad Saeed, Adrian H. Cotterell, Vinay Kumaran, Marlon F. Levy, David A. Bruno","doi":"10.1002/rcs.2631","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>Liver parenchymal transection during robotic liver resection (RLR) remains a significant challenge due to the limited range of specialised instruments. This study introduces our ‘Burn and Push’ technique as a novel approach to address these challenges.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>A retrospective analysis was conducted on 20 patients who underwent RLR using the ‘Burn and Push’ technique at Virginia Commonwealth University Health System from November 2021 to August 2023. The study evaluated peri- and post-operative outcomes.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>The median operation time was 241.5 min (range, 90–620 min), and the median blood loss was 100 mL (range, 10–600 mL). Major complications occurred in one case, with no instances of postoperative bleeding, bile leak, or liver failure.</p>\n </section>\n \n <section>\n \n <h3> Conclusions</h3>\n \n <p>The ‘Burn and Push’ technique is a viable and efficient alternative for liver parenchymal transection in RLR. Further research with larger sample sizes and consideration of the learning curve is necessary to validate these findings.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 2","pages":""},"PeriodicalIF":2.1000,"publicationDate":"2024-04-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2631","citationCount":"0","resultStr":"{\"title\":\"‘Burn and Push’ technique: A novel robotic liver parenchymal transection technique\",\"authors\":\"Yuzuru Sambommatsu, Seung Duk Lee, Daisuke Imai, Kush Savsani, Aamir A. Khan, Amit Sharma, Muhammad Saeed, Adrian H. Cotterell, Vinay Kumaran, Marlon F. Levy, David A. Bruno\",\"doi\":\"10.1002/rcs.2631\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n \\n <section>\\n \\n <h3> Background</h3>\\n \\n <p>Liver parenchymal transection during robotic liver resection (RLR) remains a significant challenge due to the limited range of specialised instruments. This study introduces our ‘Burn and Push’ technique as a novel approach to address these challenges.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Methods</h3>\\n \\n <p>A retrospective analysis was conducted on 20 patients who underwent RLR using the ‘Burn and Push’ technique at Virginia Commonwealth University Health System from November 2021 to August 2023. The study evaluated peri- and post-operative outcomes.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Results</h3>\\n \\n <p>The median operation time was 241.5 min (range, 90–620 min), and the median blood loss was 100 mL (range, 10–600 mL). Major complications occurred in one case, with no instances of postoperative bleeding, bile leak, or liver failure.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Conclusions</h3>\\n \\n <p>The ‘Burn and Push’ technique is a viable and efficient alternative for liver parenchymal transection in RLR. Further research with larger sample sizes and consideration of the learning curve is necessary to validate these findings.</p>\\n </section>\\n </div>\",\"PeriodicalId\":50311,\"journal\":{\"name\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"volume\":\"20 2\",\"pages\":\"\"},\"PeriodicalIF\":2.1000,\"publicationDate\":\"2024-04-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2631\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2631\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2631","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
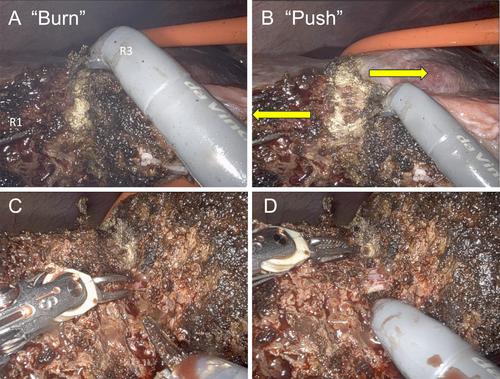
‘Burn and Push’ technique: A novel robotic liver parenchymal transection technique
Background
Liver parenchymal transection during robotic liver resection (RLR) remains a significant challenge due to the limited range of specialised instruments. This study introduces our ‘Burn and Push’ technique as a novel approach to address these challenges.
Methods
A retrospective analysis was conducted on 20 patients who underwent RLR using the ‘Burn and Push’ technique at Virginia Commonwealth University Health System from November 2021 to August 2023. The study evaluated peri- and post-operative outcomes.
Results
The median operation time was 241.5 min (range, 90–620 min), and the median blood loss was 100 mL (range, 10–600 mL). Major complications occurred in one case, with no instances of postoperative bleeding, bile leak, or liver failure.
Conclusions
The ‘Burn and Push’ technique is a viable and efficient alternative for liver parenchymal transection in RLR. Further research with larger sample sizes and consideration of the learning curve is necessary to validate these findings.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
