Yueyang Wang, Zhumu Fu, Fazhan Tao, Nan Wang, Zhengyu Guo
{"title":"基于动态曲面的非严格反馈非线性系统自适应模糊固定时间容错控制","authors":"Yueyang Wang, Zhumu Fu, Fazhan Tao, Nan Wang, Zhengyu Guo","doi":"10.1007/s40815-024-01720-4","DOIUrl":null,"url":null,"abstract":"<p>In the paper, a dynamic surface-based adaptive fuzzy fixed-time fault-tolerant control scheme is developed for nonstrict feedback nonlinear systems with non-affine faults. Firstly, the computational complexity is reduced by adopting dynamic surface control technique, and unknown nonlinear functions are approximated with the help of fuzzy logic systems. Secondly, non-affine faults involving system states and controller output are taken into account and treated by transforming it into nonlinear in the unknown parameters. Then, under the framework of fixed-time stability, a novel adaptive fuzzy fault-tolerant control strategy is designed so that the closed-loop system is semi-globally practically fixed-time stable. Finally, a numerical simulation and a model simulation are given to demonstrate the effectiveness of the proposed control scheme.</p>","PeriodicalId":14056,"journal":{"name":"International Journal of Fuzzy Systems","volume":"21 1","pages":""},"PeriodicalIF":3.6000,"publicationDate":"2024-04-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Dynamic Surface-Based Adaptive Fuzzy Fixed-Time Fault-Tolerant Control for Nonstrict Feedback Nonlinear Systems With Non-affine Faults\",\"authors\":\"Yueyang Wang, Zhumu Fu, Fazhan Tao, Nan Wang, Zhengyu Guo\",\"doi\":\"10.1007/s40815-024-01720-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In the paper, a dynamic surface-based adaptive fuzzy fixed-time fault-tolerant control scheme is developed for nonstrict feedback nonlinear systems with non-affine faults. Firstly, the computational complexity is reduced by adopting dynamic surface control technique, and unknown nonlinear functions are approximated with the help of fuzzy logic systems. Secondly, non-affine faults involving system states and controller output are taken into account and treated by transforming it into nonlinear in the unknown parameters. Then, under the framework of fixed-time stability, a novel adaptive fuzzy fault-tolerant control strategy is designed so that the closed-loop system is semi-globally practically fixed-time stable. Finally, a numerical simulation and a model simulation are given to demonstrate the effectiveness of the proposed control scheme.</p>\",\"PeriodicalId\":14056,\"journal\":{\"name\":\"International Journal of Fuzzy Systems\",\"volume\":\"21 1\",\"pages\":\"\"},\"PeriodicalIF\":3.6000,\"publicationDate\":\"2024-04-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Fuzzy Systems\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s40815-024-01720-4\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Fuzzy Systems","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s40815-024-01720-4","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Dynamic Surface-Based Adaptive Fuzzy Fixed-Time Fault-Tolerant Control for Nonstrict Feedback Nonlinear Systems With Non-affine Faults
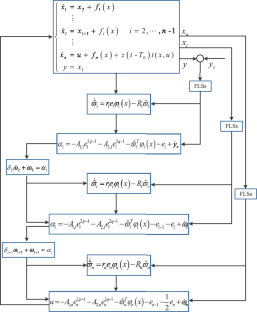
In the paper, a dynamic surface-based adaptive fuzzy fixed-time fault-tolerant control scheme is developed for nonstrict feedback nonlinear systems with non-affine faults. Firstly, the computational complexity is reduced by adopting dynamic surface control technique, and unknown nonlinear functions are approximated with the help of fuzzy logic systems. Secondly, non-affine faults involving system states and controller output are taken into account and treated by transforming it into nonlinear in the unknown parameters. Then, under the framework of fixed-time stability, a novel adaptive fuzzy fault-tolerant control strategy is designed so that the closed-loop system is semi-globally practically fixed-time stable. Finally, a numerical simulation and a model simulation are given to demonstrate the effectiveness of the proposed control scheme.
期刊介绍:
The International Journal of Fuzzy Systems (IJFS) is an official journal of Taiwan Fuzzy Systems Association (TFSA) and is published semi-quarterly. IJFS will consider high quality papers that deal with the theory, design, and application of fuzzy systems, soft computing systems, grey systems, and extension theory systems ranging from hardware to software. Survey and expository submissions are also welcome.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
