{"title":"基于磁共振的机器人辅助血管内手术导航","authors":"Jelle Bijlsma, Dennis Kundrat, Giulio Dagnino","doi":"10.1007/s41315-024-00340-3","DOIUrl":null,"url":null,"abstract":"<p>There is increasing interests in robotic and computer technologies to accurately perform endovascular intervention. One major limitation of current endovascular intervention—either manual or robot-assisted is the surgical navigation which still relies on 2D fluoroscopy. Recent research efforts are towards MRI-guided interventions to reduce ionizing radiation exposure, and to improve diagnosis, planning, navigation, and execution of endovascular interventions. We propose an MR-based navigation framework for robot-assisted endovascular procedures. The framework allows the acquisition of real-time MR images; segmentation of the vasculature and tracking of vascular instruments; and generation of MR-based guidance, both visual and haptic. The instrument tracking accuracy—a key aspect of the navigation framework—was assessed via 4 dedicated experiments with different acquisition settings, framerate, and time. The experiments showed clinically acceptable tracking accuracy in the range of 1.30–3.80 mm RMSE. We believe that this work represents a valuable first step towards MR-guided robot-assisted intervention.</p>","PeriodicalId":44563,"journal":{"name":"International Journal of Intelligent Robotics and Applications","volume":"22 1","pages":""},"PeriodicalIF":3.0000,"publicationDate":"2024-04-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"MR-based navigation for robot-assisted endovascular procedures\",\"authors\":\"Jelle Bijlsma, Dennis Kundrat, Giulio Dagnino\",\"doi\":\"10.1007/s41315-024-00340-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>There is increasing interests in robotic and computer technologies to accurately perform endovascular intervention. One major limitation of current endovascular intervention—either manual or robot-assisted is the surgical navigation which still relies on 2D fluoroscopy. Recent research efforts are towards MRI-guided interventions to reduce ionizing radiation exposure, and to improve diagnosis, planning, navigation, and execution of endovascular interventions. We propose an MR-based navigation framework for robot-assisted endovascular procedures. The framework allows the acquisition of real-time MR images; segmentation of the vasculature and tracking of vascular instruments; and generation of MR-based guidance, both visual and haptic. The instrument tracking accuracy—a key aspect of the navigation framework—was assessed via 4 dedicated experiments with different acquisition settings, framerate, and time. The experiments showed clinically acceptable tracking accuracy in the range of 1.30–3.80 mm RMSE. We believe that this work represents a valuable first step towards MR-guided robot-assisted intervention.</p>\",\"PeriodicalId\":44563,\"journal\":{\"name\":\"International Journal of Intelligent Robotics and Applications\",\"volume\":\"22 1\",\"pages\":\"\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2024-04-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Intelligent Robotics and Applications\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s41315-024-00340-3\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Intelligent Robotics and Applications","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s41315-024-00340-3","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
MR-based navigation for robot-assisted endovascular procedures
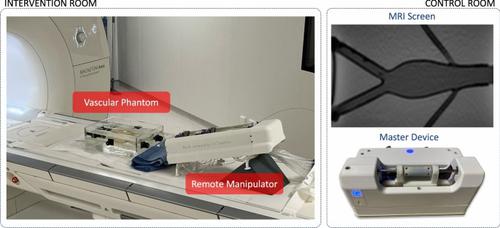
There is increasing interests in robotic and computer technologies to accurately perform endovascular intervention. One major limitation of current endovascular intervention—either manual or robot-assisted is the surgical navigation which still relies on 2D fluoroscopy. Recent research efforts are towards MRI-guided interventions to reduce ionizing radiation exposure, and to improve diagnosis, planning, navigation, and execution of endovascular interventions. We propose an MR-based navigation framework for robot-assisted endovascular procedures. The framework allows the acquisition of real-time MR images; segmentation of the vasculature and tracking of vascular instruments; and generation of MR-based guidance, both visual and haptic. The instrument tracking accuracy—a key aspect of the navigation framework—was assessed via 4 dedicated experiments with different acquisition settings, framerate, and time. The experiments showed clinically acceptable tracking accuracy in the range of 1.30–3.80 mm RMSE. We believe that this work represents a valuable first step towards MR-guided robot-assisted intervention.
期刊介绍:
The International Journal of Intelligent Robotics and Applications (IJIRA) fosters the dissemination of new discoveries and novel technologies that advance developments in robotics and their broad applications. This journal provides a publication and communication platform for all robotics topics, from the theoretical fundamentals and technological advances to various applications including manufacturing, space vehicles, biomedical systems and automobiles, data-storage devices, healthcare systems, home appliances, and intelligent highways. IJIRA welcomes contributions from researchers, professionals and industrial practitioners. It publishes original, high-quality and previously unpublished research papers, brief reports, and critical reviews. Specific areas of interest include, but are not limited to:Advanced actuators and sensorsCollective and social robots Computing, communication and controlDesign, modeling and prototypingHuman and robot interactionMachine learning and intelligenceMobile robots and intelligent autonomous systemsMulti-sensor fusion and perceptionPlanning, navigation and localizationRobot intelligence, learning and linguisticsRobotic vision, recognition and reconstructionBio-mechatronics and roboticsCloud and Swarm roboticsCognitive and neuro roboticsExploration and security roboticsHealthcare, medical and assistive roboticsRobotics for intelligent manufacturingService, social and entertainment roboticsSpace and underwater robotsNovel and emerging applications



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
