{"title":"实时准确的食品实例分割模型","authors":"Yuhe Fan, Lixun Zhang, Canxing Zheng, Yunqin Zu, Keyi Wang, Xingyuan Wang","doi":"10.1007/s11554-024-01459-z","DOIUrl":null,"url":null,"abstract":"<p>Instance segmentation of foods is an important technology to ensure the food success rate of meal-assisting robotics. However, due to foods have strong intraclass variability, interclass similarity, and complex physical properties, which leads to more challenges in recognition, localization, and contour acquisition of foods. To address the above issues, this paper proposed a novel method for instance segmentation of foods. Specifically, in backbone network, deformable convolution was introduced to enhance the ability of YOLOv8 architecture to capture finer-grained spatial information, and efficient multiscale attention based on cross-spatial learning was introduced to improve sensitivity and expressiveness of multiscale inputs. In neck network, classical convolution and C2f modules were replaced by lightweight convolution GSConv and improved VoV-GSCSP aggregation module, respectively, to improve inference speed of models. We abbreviated it as the DEG-YOLOv8n-seg model. The proposed method was compared with baseline model and several state-of-the-art (SOTA) segmentation models on datasets, respectively. The results show that the DEG-YOLOv8n-seg model has higher accuracy, faster speed, and stronger robustness. Specifically, the DEG-YOLOv8n-seg model can achieve 84.6% Box_mAP@0.5 and 84.1% Mask_mAP@0.5 accuracy at 55.2 FPS and 11.1 GFLOPs. The importance of adopting data augmentation and the effectiveness of introducing deformable convolution, EMA, and VoV-GSCSP were verified by ablation experiments. Finally, the DEG-YOLOv8n-seg model was applied to experiments of food instance segmentation for meal-assisting robots. The results show that the DEG-YOLOv8n-seg can achieve better instance segmentation of foods. This work can promote the development of intelligent meal-assisting robotics technology and can provide theoretical foundations for other tasks of the computer vision field with some reference value.</p>","PeriodicalId":51224,"journal":{"name":"Journal of Real-Time Image Processing","volume":"21 1","pages":""},"PeriodicalIF":3.0000,"publicationDate":"2024-04-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Real-time and accurate model of instance segmentation of foods\",\"authors\":\"Yuhe Fan, Lixun Zhang, Canxing Zheng, Yunqin Zu, Keyi Wang, Xingyuan Wang\",\"doi\":\"10.1007/s11554-024-01459-z\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Instance segmentation of foods is an important technology to ensure the food success rate of meal-assisting robotics. However, due to foods have strong intraclass variability, interclass similarity, and complex physical properties, which leads to more challenges in recognition, localization, and contour acquisition of foods. To address the above issues, this paper proposed a novel method for instance segmentation of foods. Specifically, in backbone network, deformable convolution was introduced to enhance the ability of YOLOv8 architecture to capture finer-grained spatial information, and efficient multiscale attention based on cross-spatial learning was introduced to improve sensitivity and expressiveness of multiscale inputs. In neck network, classical convolution and C2f modules were replaced by lightweight convolution GSConv and improved VoV-GSCSP aggregation module, respectively, to improve inference speed of models. We abbreviated it as the DEG-YOLOv8n-seg model. The proposed method was compared with baseline model and several state-of-the-art (SOTA) segmentation models on datasets, respectively. The results show that the DEG-YOLOv8n-seg model has higher accuracy, faster speed, and stronger robustness. Specifically, the DEG-YOLOv8n-seg model can achieve 84.6% Box_mAP@0.5 and 84.1% Mask_mAP@0.5 accuracy at 55.2 FPS and 11.1 GFLOPs. The importance of adopting data augmentation and the effectiveness of introducing deformable convolution, EMA, and VoV-GSCSP were verified by ablation experiments. Finally, the DEG-YOLOv8n-seg model was applied to experiments of food instance segmentation for meal-assisting robots. The results show that the DEG-YOLOv8n-seg can achieve better instance segmentation of foods. This work can promote the development of intelligent meal-assisting robotics technology and can provide theoretical foundations for other tasks of the computer vision field with some reference value.</p>\",\"PeriodicalId\":51224,\"journal\":{\"name\":\"Journal of Real-Time Image Processing\",\"volume\":\"21 1\",\"pages\":\"\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2024-04-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Real-Time Image Processing\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11554-024-01459-z\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Real-Time Image Processing","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11554-024-01459-z","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Real-time and accurate model of instance segmentation of foods
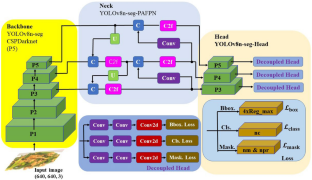
Instance segmentation of foods is an important technology to ensure the food success rate of meal-assisting robotics. However, due to foods have strong intraclass variability, interclass similarity, and complex physical properties, which leads to more challenges in recognition, localization, and contour acquisition of foods. To address the above issues, this paper proposed a novel method for instance segmentation of foods. Specifically, in backbone network, deformable convolution was introduced to enhance the ability of YOLOv8 architecture to capture finer-grained spatial information, and efficient multiscale attention based on cross-spatial learning was introduced to improve sensitivity and expressiveness of multiscale inputs. In neck network, classical convolution and C2f modules were replaced by lightweight convolution GSConv and improved VoV-GSCSP aggregation module, respectively, to improve inference speed of models. We abbreviated it as the DEG-YOLOv8n-seg model. The proposed method was compared with baseline model and several state-of-the-art (SOTA) segmentation models on datasets, respectively. The results show that the DEG-YOLOv8n-seg model has higher accuracy, faster speed, and stronger robustness. Specifically, the DEG-YOLOv8n-seg model can achieve 84.6% Box_mAP@0.5 and 84.1% Mask_mAP@0.5 accuracy at 55.2 FPS and 11.1 GFLOPs. The importance of adopting data augmentation and the effectiveness of introducing deformable convolution, EMA, and VoV-GSCSP were verified by ablation experiments. Finally, the DEG-YOLOv8n-seg model was applied to experiments of food instance segmentation for meal-assisting robots. The results show that the DEG-YOLOv8n-seg can achieve better instance segmentation of foods. This work can promote the development of intelligent meal-assisting robotics technology and can provide theoretical foundations for other tasks of the computer vision field with some reference value.
期刊介绍:
Due to rapid advancements in integrated circuit technology, the rich theoretical results that have been developed by the image and video processing research community are now being increasingly applied in practical systems to solve real-world image and video processing problems. Such systems involve constraints placed not only on their size, cost, and power consumption, but also on the timeliness of the image data processed.
Examples of such systems are mobile phones, digital still/video/cell-phone cameras, portable media players, personal digital assistants, high-definition television, video surveillance systems, industrial visual inspection systems, medical imaging devices, vision-guided autonomous robots, spectral imaging systems, and many other real-time embedded systems. In these real-time systems, strict timing requirements demand that results are available within a certain interval of time as imposed by the application.
It is often the case that an image processing algorithm is developed and proven theoretically sound, presumably with a specific application in mind, but its practical applications and the detailed steps, methodology, and trade-off analysis required to achieve its real-time performance are not fully explored, leaving these critical and usually non-trivial issues for those wishing to employ the algorithm in a real-time system.
The Journal of Real-Time Image Processing is intended to bridge the gap between the theory and practice of image processing, serving the greater community of researchers, practicing engineers, and industrial professionals who deal with designing, implementing or utilizing image processing systems which must satisfy real-time design constraints.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
