Kan Hatakeyama-Sato, Hiroki Ishikawa, Shinya Takaishi, Yasuhiko Igarashi, Yuta Nabae, Teruaki Hayakawa
{"title":"利用机器人系统进行半自动实验,并通过基础模型生成数据,用于合成聚酰胺酸颗粒","authors":"Kan Hatakeyama-Sato, Hiroki Ishikawa, Shinya Takaishi, Yasuhiko Igarashi, Yuta Nabae, Teruaki Hayakawa","doi":"10.1038/s41428-024-00930-9","DOIUrl":null,"url":null,"abstract":"A semiautomated system for synthesizing polyamic acid particles using a custom liquid-handling device and a robotic arm is proposed in this study. Integration of cameras and a multimodal large language model facilitates continuous monitoring and documentation, enhancing objectivity in synthetic experiments and enabling future advancements in experimental research. This study proposes a semiautomated system for synthesizing polyamic acid particles using a custom liquid-handling device and a robotic arm. Integrating cameras and a multimodal large language model enhances continuous monitoring and documentation, improving objectivity in synthetic experiments and enabling future advancements in research.","PeriodicalId":20302,"journal":{"name":"Polymer Journal","volume":"56 11","pages":"977-986"},"PeriodicalIF":2.7000,"publicationDate":"2024-07-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s41428-024-00930-9.pdf","citationCount":"0","resultStr":"{\"title\":\"Semiautomated experiment with a robotic system and data generation by foundation models for synthesis of polyamic acid particles\",\"authors\":\"Kan Hatakeyama-Sato, Hiroki Ishikawa, Shinya Takaishi, Yasuhiko Igarashi, Yuta Nabae, Teruaki Hayakawa\",\"doi\":\"10.1038/s41428-024-00930-9\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"A semiautomated system for synthesizing polyamic acid particles using a custom liquid-handling device and a robotic arm is proposed in this study. Integration of cameras and a multimodal large language model facilitates continuous monitoring and documentation, enhancing objectivity in synthetic experiments and enabling future advancements in experimental research. This study proposes a semiautomated system for synthesizing polyamic acid particles using a custom liquid-handling device and a robotic arm. Integrating cameras and a multimodal large language model enhances continuous monitoring and documentation, improving objectivity in synthetic experiments and enabling future advancements in research.\",\"PeriodicalId\":20302,\"journal\":{\"name\":\"Polymer Journal\",\"volume\":\"56 11\",\"pages\":\"977-986\"},\"PeriodicalIF\":2.7000,\"publicationDate\":\"2024-07-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.nature.com/articles/s41428-024-00930-9.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Polymer Journal\",\"FirstCategoryId\":\"92\",\"ListUrlMain\":\"https://www.nature.com/articles/s41428-024-00930-9\",\"RegionNum\":4,\"RegionCategory\":\"化学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"POLYMER SCIENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Polymer Journal","FirstCategoryId":"92","ListUrlMain":"https://www.nature.com/articles/s41428-024-00930-9","RegionNum":4,"RegionCategory":"化学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"POLYMER SCIENCE","Score":null,"Total":0}
Semiautomated experiment with a robotic system and data generation by foundation models for synthesis of polyamic acid particles
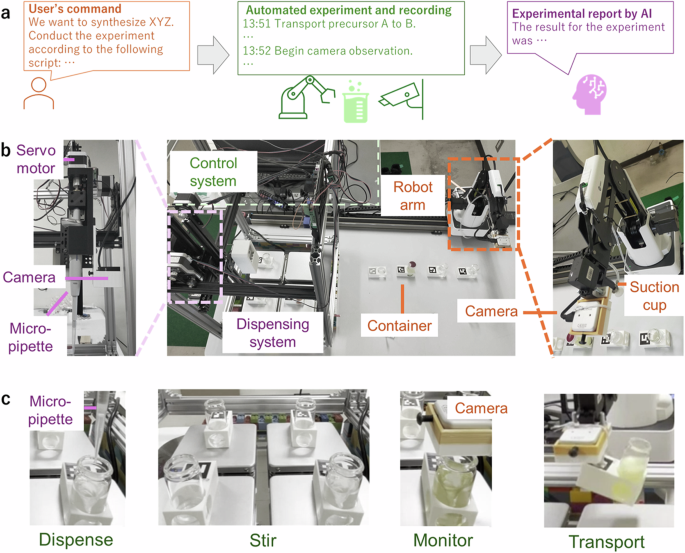
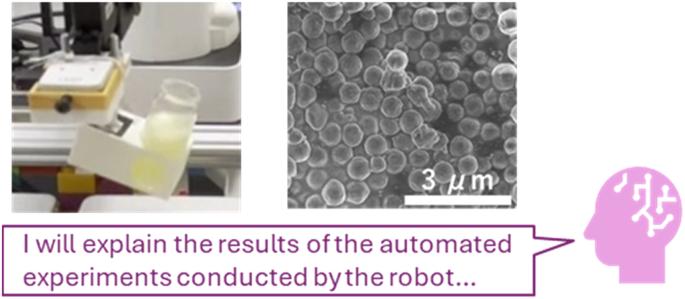
A semiautomated system for synthesizing polyamic acid particles using a custom liquid-handling device and a robotic arm is proposed in this study. Integration of cameras and a multimodal large language model facilitates continuous monitoring and documentation, enhancing objectivity in synthetic experiments and enabling future advancements in experimental research. This study proposes a semiautomated system for synthesizing polyamic acid particles using a custom liquid-handling device and a robotic arm. Integrating cameras and a multimodal large language model enhances continuous monitoring and documentation, improving objectivity in synthetic experiments and enabling future advancements in research.
期刊介绍:
Polymer Journal promotes research from all aspects of polymer science from anywhere in the world and aims to provide an integrated platform for scientific communication that assists the advancement of polymer science and related fields. The journal publishes Original Articles, Notes, Short Communications and Reviews.
Subject areas and topics of particular interest within the journal''s scope include, but are not limited to, those listed below:
Polymer synthesis and reactions
Polymer structures
Physical properties of polymers
Polymer surface and interfaces
Functional polymers
Supramolecular polymers
Self-assembled materials
Biopolymers and bio-related polymer materials
Polymer engineering.


 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
