{"title":"用于压力监测和物体识别的深度学习辅助压阻智能手套","authors":"Jie Zhu, Shuai Zhang, Shuqi Ma, Jiacheng Wang, Quanbo Yuan, Xin Luo, Hancheng Chai, Jinchen Liu, Zhenhua Jia","doi":"10.1002/admt.202400254","DOIUrl":null,"url":null,"abstract":"<p>The array of tactile information processing capabilities is an important index for modern intelligent devices advancing toward a humanoid form, and it greatly improves the recognition of different objects in human-computer interactions. Herein, a deep-learning-assisted intelligent grasping recognition system based on a piezoresistive sensing glove, hardware conditioning, and acquisition circuits, and a multibranch deep-capsule network is reported. Owing to the multiscale 3D structure of carbon nanotube (CNTs)/carbon fiber (CFs) embedded in polydimethylsiloxane (PDMS), the piezoresistive sensing glove is highly sensitive to the pressure exerted by external objects. The acquired signals are reflected on a hand-like background map, and a combination of multiple subgraphs is used to build the dataset. A multibranch deep-capsule network is constructed to encode spatial information while realizing object recognition with an accuracy of 99.4%. Therefore, the proposed intelligent grasping recognition system possesses good human-robot interaction capabilities, providing a new approach for the development of intelligent robots in the field of perceptual recognition applications.</p>","PeriodicalId":7292,"journal":{"name":"Advanced Materials Technologies","volume":"9 20","pages":""},"PeriodicalIF":6.4000,"publicationDate":"2024-07-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Deep-Learning-Assisted Piezoresistive Intelligent Glove for Pressure Monitoring and Object Identification\",\"authors\":\"Jie Zhu, Shuai Zhang, Shuqi Ma, Jiacheng Wang, Quanbo Yuan, Xin Luo, Hancheng Chai, Jinchen Liu, Zhenhua Jia\",\"doi\":\"10.1002/admt.202400254\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The array of tactile information processing capabilities is an important index for modern intelligent devices advancing toward a humanoid form, and it greatly improves the recognition of different objects in human-computer interactions. Herein, a deep-learning-assisted intelligent grasping recognition system based on a piezoresistive sensing glove, hardware conditioning, and acquisition circuits, and a multibranch deep-capsule network is reported. Owing to the multiscale 3D structure of carbon nanotube (CNTs)/carbon fiber (CFs) embedded in polydimethylsiloxane (PDMS), the piezoresistive sensing glove is highly sensitive to the pressure exerted by external objects. The acquired signals are reflected on a hand-like background map, and a combination of multiple subgraphs is used to build the dataset. A multibranch deep-capsule network is constructed to encode spatial information while realizing object recognition with an accuracy of 99.4%. Therefore, the proposed intelligent grasping recognition system possesses good human-robot interaction capabilities, providing a new approach for the development of intelligent robots in the field of perceptual recognition applications.</p>\",\"PeriodicalId\":7292,\"journal\":{\"name\":\"Advanced Materials Technologies\",\"volume\":\"9 20\",\"pages\":\"\"},\"PeriodicalIF\":6.4000,\"publicationDate\":\"2024-07-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Materials Technologies\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/admt.202400254\",\"RegionNum\":3,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MATERIALS SCIENCE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Materials Technologies","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/admt.202400254","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
Deep-Learning-Assisted Piezoresistive Intelligent Glove for Pressure Monitoring and Object Identification
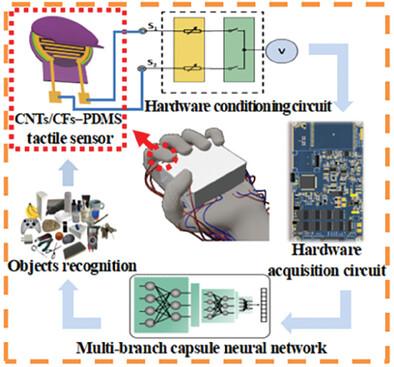
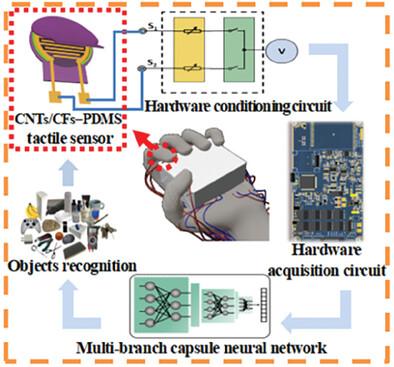
The array of tactile information processing capabilities is an important index for modern intelligent devices advancing toward a humanoid form, and it greatly improves the recognition of different objects in human-computer interactions. Herein, a deep-learning-assisted intelligent grasping recognition system based on a piezoresistive sensing glove, hardware conditioning, and acquisition circuits, and a multibranch deep-capsule network is reported. Owing to the multiscale 3D structure of carbon nanotube (CNTs)/carbon fiber (CFs) embedded in polydimethylsiloxane (PDMS), the piezoresistive sensing glove is highly sensitive to the pressure exerted by external objects. The acquired signals are reflected on a hand-like background map, and a combination of multiple subgraphs is used to build the dataset. A multibranch deep-capsule network is constructed to encode spatial information while realizing object recognition with an accuracy of 99.4%. Therefore, the proposed intelligent grasping recognition system possesses good human-robot interaction capabilities, providing a new approach for the development of intelligent robots in the field of perceptual recognition applications.
期刊介绍:
Advanced Materials Technologies Advanced Materials Technologies is the new home for all technology-related materials applications research, with particular focus on advanced device design, fabrication and integration, as well as new technologies based on novel materials. It bridges the gap between fundamental laboratory research and industry.





 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
