{"title":"基于三维运动学的双机器人实时定位方法","authors":"Guy Elmakis, Matan Coronel, David Zarrouk","doi":"10.1002/rob.22383","DOIUrl":null,"url":null,"abstract":"<p>This paper presents a precise two-robot collaboration method for three-dimensional (3D) self-localization relying on a single rotating camera and onboard accelerometers used to measure the tilt of the robots. This method allows for localization in global positioning system-denied environments and in the presence of magnetic interference or relatively (or totally) dark and unstructured unmarked locations. One robot moves forward on each step while the other remains stationary. The tilt angles of the robots obtained from the accelerometers and the rotational angle of the turret, associated with the video analysis, make it possible to continuously calculate the location of each robot. We describe a hardware setup used for experiments and provide a detailed description of the algorithm that fuses the data obtained by the accelerometers and cameras and runs in real-time on onboard microcomputers. Finally, we present 2D and 3D experimental results, which show that the system achieves 2% accuracy for the total traveled distance (see Supporting Information S1: video).</p>","PeriodicalId":192,"journal":{"name":"Journal of Field Robotics","volume":"41 8","pages":"2676-2688"},"PeriodicalIF":5.2000,"publicationDate":"2024-07-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rob.22383","citationCount":"0","resultStr":"{\"title\":\"Three-dimensional kinematics-based real-time localization method using two robots\",\"authors\":\"Guy Elmakis, Matan Coronel, David Zarrouk\",\"doi\":\"10.1002/rob.22383\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This paper presents a precise two-robot collaboration method for three-dimensional (3D) self-localization relying on a single rotating camera and onboard accelerometers used to measure the tilt of the robots. This method allows for localization in global positioning system-denied environments and in the presence of magnetic interference or relatively (or totally) dark and unstructured unmarked locations. One robot moves forward on each step while the other remains stationary. The tilt angles of the robots obtained from the accelerometers and the rotational angle of the turret, associated with the video analysis, make it possible to continuously calculate the location of each robot. We describe a hardware setup used for experiments and provide a detailed description of the algorithm that fuses the data obtained by the accelerometers and cameras and runs in real-time on onboard microcomputers. Finally, we present 2D and 3D experimental results, which show that the system achieves 2% accuracy for the total traveled distance (see Supporting Information S1: video).</p>\",\"PeriodicalId\":192,\"journal\":{\"name\":\"Journal of Field Robotics\",\"volume\":\"41 8\",\"pages\":\"2676-2688\"},\"PeriodicalIF\":5.2000,\"publicationDate\":\"2024-07-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rob.22383\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Field Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rob.22383\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Field Robotics","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rob.22383","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
Three-dimensional kinematics-based real-time localization method using two robots
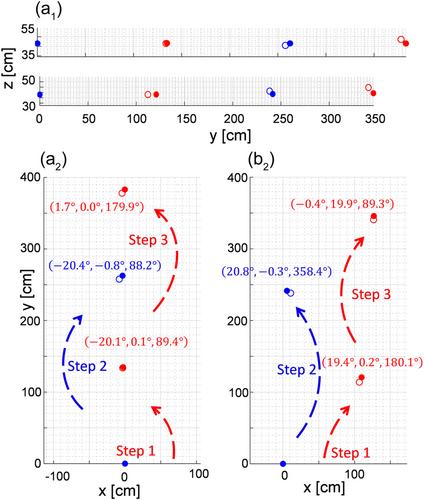
This paper presents a precise two-robot collaboration method for three-dimensional (3D) self-localization relying on a single rotating camera and onboard accelerometers used to measure the tilt of the robots. This method allows for localization in global positioning system-denied environments and in the presence of magnetic interference or relatively (or totally) dark and unstructured unmarked locations. One robot moves forward on each step while the other remains stationary. The tilt angles of the robots obtained from the accelerometers and the rotational angle of the turret, associated with the video analysis, make it possible to continuously calculate the location of each robot. We describe a hardware setup used for experiments and provide a detailed description of the algorithm that fuses the data obtained by the accelerometers and cameras and runs in real-time on onboard microcomputers. Finally, we present 2D and 3D experimental results, which show that the system achieves 2% accuracy for the total traveled distance (see Supporting Information S1: video).
期刊介绍:
The Journal of Field Robotics seeks to promote scholarly publications dealing with the fundamentals of robotics in unstructured and dynamic environments.
The Journal focuses on experimental robotics and encourages publication of work that has both theoretical and practical significance.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
