{"title":"基于不确定性感知激光雷达的户外移动机器人定位系统","authors":"Geonhyeok Park, Woojin Chung","doi":"10.1002/rob.22392","DOIUrl":null,"url":null,"abstract":"<p>Accurate and robust localization is essential for autonomous mobile robots. Map matching based on Light Detection and Ranging (LiDAR) sensors has been widely adopted to estimate the global location of robots. However, map-matching performance can be degraded when the environment changes or when sufficient features are unavailable. Indiscriminately incorporating inaccurate map-matching poses for localization can significantly decrease the reliability of pose estimation. This paper aims to develop a robust LiDAR-based localization method based on map matching. We focus on determining appropriate weights that are computed from the uncertainty of map-matching poses. The uncertainty of map-matching poses is estimated by the probability distribution over the poses. We exploit the normal distribution transform map to derive the probability distribution. A factor graph is employed to combine the map-matching pose, LiDAR-inertial odometry, and global navigation satellite system information. Experimental verification was successfully conducted outdoors on the university campus in three different scenarios, each involving changing or dynamic environments. We compared the performance of the proposed method with three LiDAR-based localization methods. The experimental results show that robust localization performances can be achieved even when map-matching poses are inaccurate in various outdoor environments. The experimental video can be found at https://youtu.be/L6p8gwxn4ak.</p>","PeriodicalId":192,"journal":{"name":"Journal of Field Robotics","volume":"41 8","pages":"2790-2804"},"PeriodicalIF":5.2000,"publicationDate":"2024-07-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rob.22392","citationCount":"0","resultStr":"{\"title\":\"Uncertainty-aware LiDAR-based localization for outdoor mobile robots\",\"authors\":\"Geonhyeok Park, Woojin Chung\",\"doi\":\"10.1002/rob.22392\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Accurate and robust localization is essential for autonomous mobile robots. Map matching based on Light Detection and Ranging (LiDAR) sensors has been widely adopted to estimate the global location of robots. However, map-matching performance can be degraded when the environment changes or when sufficient features are unavailable. Indiscriminately incorporating inaccurate map-matching poses for localization can significantly decrease the reliability of pose estimation. This paper aims to develop a robust LiDAR-based localization method based on map matching. We focus on determining appropriate weights that are computed from the uncertainty of map-matching poses. The uncertainty of map-matching poses is estimated by the probability distribution over the poses. We exploit the normal distribution transform map to derive the probability distribution. A factor graph is employed to combine the map-matching pose, LiDAR-inertial odometry, and global navigation satellite system information. Experimental verification was successfully conducted outdoors on the university campus in three different scenarios, each involving changing or dynamic environments. We compared the performance of the proposed method with three LiDAR-based localization methods. The experimental results show that robust localization performances can be achieved even when map-matching poses are inaccurate in various outdoor environments. The experimental video can be found at https://youtu.be/L6p8gwxn4ak.</p>\",\"PeriodicalId\":192,\"journal\":{\"name\":\"Journal of Field Robotics\",\"volume\":\"41 8\",\"pages\":\"2790-2804\"},\"PeriodicalIF\":5.2000,\"publicationDate\":\"2024-07-09\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rob.22392\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Field Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rob.22392\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Field Robotics","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rob.22392","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
Uncertainty-aware LiDAR-based localization for outdoor mobile robots
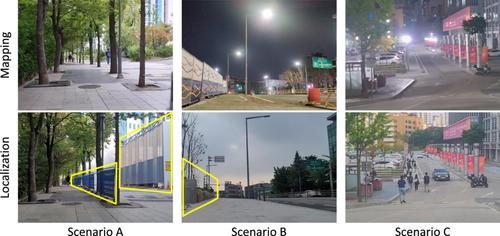
Accurate and robust localization is essential for autonomous mobile robots. Map matching based on Light Detection and Ranging (LiDAR) sensors has been widely adopted to estimate the global location of robots. However, map-matching performance can be degraded when the environment changes or when sufficient features are unavailable. Indiscriminately incorporating inaccurate map-matching poses for localization can significantly decrease the reliability of pose estimation. This paper aims to develop a robust LiDAR-based localization method based on map matching. We focus on determining appropriate weights that are computed from the uncertainty of map-matching poses. The uncertainty of map-matching poses is estimated by the probability distribution over the poses. We exploit the normal distribution transform map to derive the probability distribution. A factor graph is employed to combine the map-matching pose, LiDAR-inertial odometry, and global navigation satellite system information. Experimental verification was successfully conducted outdoors on the university campus in three different scenarios, each involving changing or dynamic environments. We compared the performance of the proposed method with three LiDAR-based localization methods. The experimental results show that robust localization performances can be achieved even when map-matching poses are inaccurate in various outdoor environments. The experimental video can be found at https://youtu.be/L6p8gwxn4ak.
期刊介绍:
The Journal of Field Robotics seeks to promote scholarly publications dealing with the fundamentals of robotics in unstructured and dynamic environments.
The Journal focuses on experimental robotics and encourages publication of work that has both theoretical and practical significance.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
