{"title":"基于学习的方法使移动机器人能够使用标准墙面插座为电池充电","authors":"Yufeng Sun, Ou Ma","doi":"10.1007/s11370-024-00551-4","DOIUrl":null,"url":null,"abstract":"<h3 data-test=\"abstract-sub-heading\">Abstract</h3><p>Autonomous battery charging is crucial for mobile service robots in human-center indoor environments, enabling them to extend operational hours and coverage without human assistance. This paper presents an innovative approach for mobile service robots to charge their batteries using standard wall outlets, introducing no additional maintenance cost and requiring no modification to environments. A portable self-charging device, equipped with cameras, a force sensor, and a 2-degree-of-freedom end-effector carrying a standard 3-pin 120V power plug, is attached to an existing mobile robot. The robot identifies a wall outlet and navigates to it using an onboard depth camera. It inserts the plug into the wall outlet while the vision is obstructed. The plug-insertion operation is guided by a control policy that was trained by a simulation model using a deep reinforcement learning technique. This approach achieved a success rate of nearly <span>\\(90\\%\\)</span> in experiments of inserting a power plug into a wall outlet. It eliminates the need of an installed docking station for autonomous charging or human plugging-in for manual charging.</p><h3 data-test=\"abstract-sub-heading\">Graphical Abstract</h3>","PeriodicalId":48813,"journal":{"name":"Intelligent Service Robotics","volume":"65 1","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2024-07-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Learning-based approach to enable mobile robots to charge batteries using standard wall outlets\",\"authors\":\"Yufeng Sun, Ou Ma\",\"doi\":\"10.1007/s11370-024-00551-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<h3 data-test=\\\"abstract-sub-heading\\\">Abstract</h3><p>Autonomous battery charging is crucial for mobile service robots in human-center indoor environments, enabling them to extend operational hours and coverage without human assistance. This paper presents an innovative approach for mobile service robots to charge their batteries using standard wall outlets, introducing no additional maintenance cost and requiring no modification to environments. A portable self-charging device, equipped with cameras, a force sensor, and a 2-degree-of-freedom end-effector carrying a standard 3-pin 120V power plug, is attached to an existing mobile robot. The robot identifies a wall outlet and navigates to it using an onboard depth camera. It inserts the plug into the wall outlet while the vision is obstructed. The plug-insertion operation is guided by a control policy that was trained by a simulation model using a deep reinforcement learning technique. This approach achieved a success rate of nearly <span>\\\\(90\\\\%\\\\)</span> in experiments of inserting a power plug into a wall outlet. It eliminates the need of an installed docking station for autonomous charging or human plugging-in for manual charging.</p><h3 data-test=\\\"abstract-sub-heading\\\">Graphical Abstract</h3>\",\"PeriodicalId\":48813,\"journal\":{\"name\":\"Intelligent Service Robotics\",\"volume\":\"65 1\",\"pages\":\"\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2024-07-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Intelligent Service Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11370-024-00551-4\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Intelligent Service Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11370-024-00551-4","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
Learning-based approach to enable mobile robots to charge batteries using standard wall outlets
Abstract
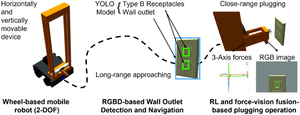
Autonomous battery charging is crucial for mobile service robots in human-center indoor environments, enabling them to extend operational hours and coverage without human assistance. This paper presents an innovative approach for mobile service robots to charge their batteries using standard wall outlets, introducing no additional maintenance cost and requiring no modification to environments. A portable self-charging device, equipped with cameras, a force sensor, and a 2-degree-of-freedom end-effector carrying a standard 3-pin 120V power plug, is attached to an existing mobile robot. The robot identifies a wall outlet and navigates to it using an onboard depth camera. It inserts the plug into the wall outlet while the vision is obstructed. The plug-insertion operation is guided by a control policy that was trained by a simulation model using a deep reinforcement learning technique. This approach achieved a success rate of nearly \(90\%\) in experiments of inserting a power plug into a wall outlet. It eliminates the need of an installed docking station for autonomous charging or human plugging-in for manual charging.
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
