{"title":"致动器-结构界面的无系重构","authors":"Bok Seng Yeow, Yang Yang, Hongliang Ren","doi":"10.1002/admt.202400707","DOIUrl":null,"url":null,"abstract":"<p>Reconfigurable structures can perform multiple functions and are useful in confined environments with complicated access. To extend the complexity of configurations achievable with reconfigurable mechanisms, remotely reconfigurable mechanisms are explored. Magnetically responsive phase change materials are selected for actuation, and origami backbones as the structure. Modulating the mechanism's coupling and constraints, multiple configurations are achieved. Three functional aspects of in situ reconfiguration are demonstrated. First, selective attachment and actuation enable remote mechanisms to deploy and actuate. Second, reconfiguration that modifies the constraints allows for new kinematics even in confined environments. Third, the actuator can construct and change the configuration of an origami structure, allowing subsequent functions to emerge. Tetherless interface reconfiguration is demonstrated with an in situ needle puncture and escape room puzzle, which can benefit existing robotic applications in confined spaces.</p>","PeriodicalId":7292,"journal":{"name":"Advanced Materials Technologies","volume":"9 24","pages":""},"PeriodicalIF":6.4000,"publicationDate":"2024-08-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/admt.202400707","citationCount":"0","resultStr":"{\"title\":\"Tetherless Reconfigurations at Actuator-Structure Interfaces\",\"authors\":\"Bok Seng Yeow, Yang Yang, Hongliang Ren\",\"doi\":\"10.1002/admt.202400707\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Reconfigurable structures can perform multiple functions and are useful in confined environments with complicated access. To extend the complexity of configurations achievable with reconfigurable mechanisms, remotely reconfigurable mechanisms are explored. Magnetically responsive phase change materials are selected for actuation, and origami backbones as the structure. Modulating the mechanism's coupling and constraints, multiple configurations are achieved. Three functional aspects of in situ reconfiguration are demonstrated. First, selective attachment and actuation enable remote mechanisms to deploy and actuate. Second, reconfiguration that modifies the constraints allows for new kinematics even in confined environments. Third, the actuator can construct and change the configuration of an origami structure, allowing subsequent functions to emerge. Tetherless interface reconfiguration is demonstrated with an in situ needle puncture and escape room puzzle, which can benefit existing robotic applications in confined spaces.</p>\",\"PeriodicalId\":7292,\"journal\":{\"name\":\"Advanced Materials Technologies\",\"volume\":\"9 24\",\"pages\":\"\"},\"PeriodicalIF\":6.4000,\"publicationDate\":\"2024-08-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/admt.202400707\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advanced Materials Technologies\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://advanced.onlinelibrary.wiley.com/doi/10.1002/admt.202400707\",\"RegionNum\":3,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MATERIALS SCIENCE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Materials Technologies","FirstCategoryId":"88","ListUrlMain":"https://advanced.onlinelibrary.wiley.com/doi/10.1002/admt.202400707","RegionNum":3,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
Tetherless Reconfigurations at Actuator-Structure Interfaces
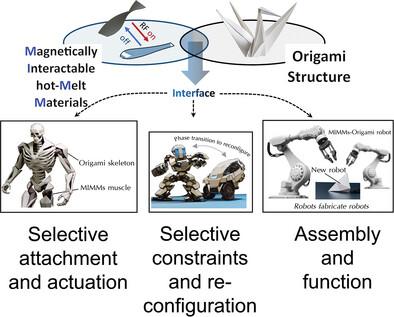
Reconfigurable structures can perform multiple functions and are useful in confined environments with complicated access. To extend the complexity of configurations achievable with reconfigurable mechanisms, remotely reconfigurable mechanisms are explored. Magnetically responsive phase change materials are selected for actuation, and origami backbones as the structure. Modulating the mechanism's coupling and constraints, multiple configurations are achieved. Three functional aspects of in situ reconfiguration are demonstrated. First, selective attachment and actuation enable remote mechanisms to deploy and actuate. Second, reconfiguration that modifies the constraints allows for new kinematics even in confined environments. Third, the actuator can construct and change the configuration of an origami structure, allowing subsequent functions to emerge. Tetherless interface reconfiguration is demonstrated with an in situ needle puncture and escape room puzzle, which can benefit existing robotic applications in confined spaces.
期刊介绍:
Advanced Materials Technologies Advanced Materials Technologies is the new home for all technology-related materials applications research, with particular focus on advanced device design, fabrication and integration, as well as new technologies based on novel materials. It bridges the gap between fundamental laboratory research and industry.






 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
