{"title":"用于眼科手术的具有远程运动中心的并行机器人:设计、运动学、原型和实验。","authors":"Yinglun Jian, Yan Jin, Mark Price, Johnny Moore","doi":"10.1002/rcs.2665","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>Millions of patients suffering from eye disease cannot receive proper treatment due to the lack of qualified surgeons. Medical robots have the potential to solve this problem and have attracted significant attention in the research community.</p>\n </section>\n \n <section>\n \n <h3> Method</h3>\n \n <p>This paper proposes a novel parallel robot with a remote centre of motion for minimally invasive eye surgery. Kinematics models, singularity and workspace analyses, and dimension optimisation are conducted. A prototype was developed, and experiments were conducted to test its mobility, accuracy, precision and stiffness.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>The prototype robot can successfully perform the required motions, and has a precision ranging from 7 ± 2 μm to 30 ± 8 μm, accuracy from 21 ± 10 μm to 568 ± 374 μm, and stiffness ranging from 1.22 ± 0.39 N/mm to 10.53 ± 5.18 N/mm.</p>\n </section>\n \n <section>\n \n <h3> Conclusion</h3>\n \n <p>The prototype robot has a great potential for performing the minimally invasive surgery. Its stiffness meets the design requirement, but its accuracy and precision need to be further improved.</p>\n </section>\n </div>","PeriodicalId":50311,"journal":{"name":"International Journal of Medical Robotics and Computer Assisted Surgery","volume":"20 4","pages":""},"PeriodicalIF":2.4000,"publicationDate":"2024-08-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2665","citationCount":"0","resultStr":"{\"title\":\"A Parallel Robot With Remote Centre-of-Motion for Eye Surgery: Design, Kinematics, Prototype, and Experiments\",\"authors\":\"Yinglun Jian, Yan Jin, Mark Price, Johnny Moore\",\"doi\":\"10.1002/rcs.2665\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n \\n <section>\\n \\n <h3> Background</h3>\\n \\n <p>Millions of patients suffering from eye disease cannot receive proper treatment due to the lack of qualified surgeons. Medical robots have the potential to solve this problem and have attracted significant attention in the research community.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Method</h3>\\n \\n <p>This paper proposes a novel parallel robot with a remote centre of motion for minimally invasive eye surgery. Kinematics models, singularity and workspace analyses, and dimension optimisation are conducted. A prototype was developed, and experiments were conducted to test its mobility, accuracy, precision and stiffness.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Results</h3>\\n \\n <p>The prototype robot can successfully perform the required motions, and has a precision ranging from 7 ± 2 μm to 30 ± 8 μm, accuracy from 21 ± 10 μm to 568 ± 374 μm, and stiffness ranging from 1.22 ± 0.39 N/mm to 10.53 ± 5.18 N/mm.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Conclusion</h3>\\n \\n <p>The prototype robot has a great potential for performing the minimally invasive surgery. Its stiffness meets the design requirement, but its accuracy and precision need to be further improved.</p>\\n </section>\\n </div>\",\"PeriodicalId\":50311,\"journal\":{\"name\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"volume\":\"20 4\",\"pages\":\"\"},\"PeriodicalIF\":2.4000,\"publicationDate\":\"2024-08-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/rcs.2665\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Medical Robotics and Computer Assisted Surgery\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2665\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Medical Robotics and Computer Assisted Surgery","FirstCategoryId":"3","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/rcs.2665","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
A Parallel Robot With Remote Centre-of-Motion for Eye Surgery: Design, Kinematics, Prototype, and Experiments
Background
Millions of patients suffering from eye disease cannot receive proper treatment due to the lack of qualified surgeons. Medical robots have the potential to solve this problem and have attracted significant attention in the research community.
Method
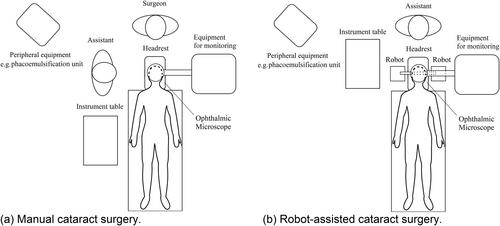
This paper proposes a novel parallel robot with a remote centre of motion for minimally invasive eye surgery. Kinematics models, singularity and workspace analyses, and dimension optimisation are conducted. A prototype was developed, and experiments were conducted to test its mobility, accuracy, precision and stiffness.
Results
The prototype robot can successfully perform the required motions, and has a precision ranging from 7 ± 2 μm to 30 ± 8 μm, accuracy from 21 ± 10 μm to 568 ± 374 μm, and stiffness ranging from 1.22 ± 0.39 N/mm to 10.53 ± 5.18 N/mm.
Conclusion
The prototype robot has a great potential for performing the minimally invasive surgery. Its stiffness meets the design requirement, but its accuracy and precision need to be further improved.
期刊介绍:
The International Journal of Medical Robotics and Computer Assisted Surgery provides a cross-disciplinary platform for presenting the latest developments in robotics and computer assisted technologies for medical applications. The journal publishes cutting-edge papers and expert reviews, complemented by commentaries, correspondence and conference highlights that stimulate discussion and exchange of ideas. Areas of interest include robotic surgery aids and systems, operative planning tools, medical imaging and visualisation, simulation and navigation, virtual reality, intuitive command and control systems, haptics and sensor technologies. In addition to research and surgical planning studies, the journal welcomes papers detailing clinical trials and applications of computer-assisted workflows and robotic systems in neurosurgery, urology, paediatric, orthopaedic, craniofacial, cardiovascular, thoraco-abdominal, musculoskeletal and visceral surgery. Articles providing critical analysis of clinical trials, assessment of the benefits and risks of the application of these technologies, commenting on ease of use, or addressing surgical education and training issues are also encouraged. The journal aims to foster a community that encompasses medical practitioners, researchers, and engineers and computer scientists developing robotic systems and computational tools in academic and commercial environments, with the intention of promoting and developing these exciting areas of medical technology.



 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
