Hangyeol Kang, Maher Ben Moussa, Nadia Magnenat Thalmann
{"title":"纳丁大型语言模型驱动的智能社交机器人,具有情感能力和类人记忆力","authors":"Hangyeol Kang, Maher Ben Moussa, Nadia Magnenat Thalmann","doi":"10.1002/cav.2290","DOIUrl":null,"url":null,"abstract":"<p>In this work, we describe our approach to developing an intelligent and robust social robotic system for the Nadine social robot platform. We achieve this by integrating large language models (LLMs) and skillfully leveraging the powerful reasoning and instruction-following capabilities of these types of models to achieve advanced human-like affective and cognitive capabilities. This approach is novel compared to the current state-of-the-art LLM-based agents which do not implement human-like long-term memory or sophisticated emotional capabilities. We built a social robot system that enables generating appropriate behaviors through multimodal input processing, bringing episodic memories accordingly to the recognized user, and simulating the emotional states of the robot induced by the interaction with the human partner. In particular, we introduce an LLM-agent frame for social robots, social robotics reasoning and acting, serving as a core component for the interaction module in our system. This design has brought forth the advancement of social robots and aims to increase the quality of human–robot interaction.</p>","PeriodicalId":50645,"journal":{"name":"Computer Animation and Virtual Worlds","volume":"35 4","pages":""},"PeriodicalIF":3.4000,"publicationDate":"2024-08-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/cav.2290","citationCount":"0","resultStr":"{\"title\":\"Nadine: A large language model-driven intelligent social robot with affective capabilities and human-like memory\",\"authors\":\"Hangyeol Kang, Maher Ben Moussa, Nadia Magnenat Thalmann\",\"doi\":\"10.1002/cav.2290\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In this work, we describe our approach to developing an intelligent and robust social robotic system for the Nadine social robot platform. We achieve this by integrating large language models (LLMs) and skillfully leveraging the powerful reasoning and instruction-following capabilities of these types of models to achieve advanced human-like affective and cognitive capabilities. This approach is novel compared to the current state-of-the-art LLM-based agents which do not implement human-like long-term memory or sophisticated emotional capabilities. We built a social robot system that enables generating appropriate behaviors through multimodal input processing, bringing episodic memories accordingly to the recognized user, and simulating the emotional states of the robot induced by the interaction with the human partner. In particular, we introduce an LLM-agent frame for social robots, social robotics reasoning and acting, serving as a core component for the interaction module in our system. This design has brought forth the advancement of social robots and aims to increase the quality of human–robot interaction.</p>\",\"PeriodicalId\":50645,\"journal\":{\"name\":\"Computer Animation and Virtual Worlds\",\"volume\":\"35 4\",\"pages\":\"\"},\"PeriodicalIF\":3.4000,\"publicationDate\":\"2024-08-15\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/cav.2290\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Computer Animation and Virtual Worlds\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1002/cav.2290\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"COMPUTER SCIENCE, SOFTWARE ENGINEERING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computer Animation and Virtual Worlds","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/cav.2290","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
Nadine: A large language model-driven intelligent social robot with affective capabilities and human-like memory
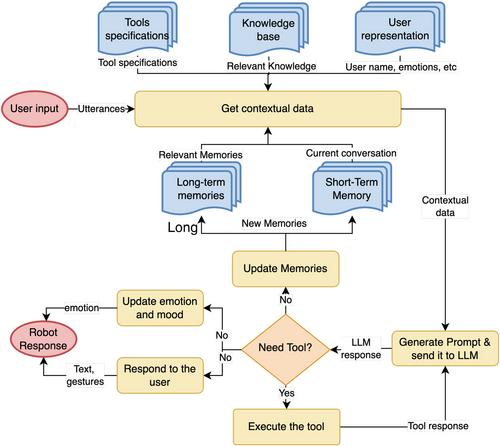
In this work, we describe our approach to developing an intelligent and robust social robotic system for the Nadine social robot platform. We achieve this by integrating large language models (LLMs) and skillfully leveraging the powerful reasoning and instruction-following capabilities of these types of models to achieve advanced human-like affective and cognitive capabilities. This approach is novel compared to the current state-of-the-art LLM-based agents which do not implement human-like long-term memory or sophisticated emotional capabilities. We built a social robot system that enables generating appropriate behaviors through multimodal input processing, bringing episodic memories accordingly to the recognized user, and simulating the emotional states of the robot induced by the interaction with the human partner. In particular, we introduce an LLM-agent frame for social robots, social robotics reasoning and acting, serving as a core component for the interaction module in our system. This design has brought forth the advancement of social robots and aims to increase the quality of human–robot interaction.
期刊介绍:
With the advent of very powerful PCs and high-end graphics cards, there has been an incredible development in Virtual Worlds, real-time computer animation and simulation, games. But at the same time, new and cheaper Virtual Reality devices have appeared allowing an interaction with these real-time Virtual Worlds and even with real worlds through Augmented Reality. Three-dimensional characters, especially Virtual Humans are now of an exceptional quality, which allows to use them in the movie industry. But this is only a beginning, as with the development of Artificial Intelligence and Agent technology, these characters will become more and more autonomous and even intelligent. They will inhabit the Virtual Worlds in a Virtual Life together with animals and plants.




 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
