{"title":"研究控制对象单一分离的杜宾斯车辆混合动力模型的性能","authors":"A. S. Bortakovskii, I. V. Uryupin","doi":"10.1134/s1064230724700072","DOIUrl":null,"url":null,"abstract":"<h3 data-test=\"abstract-sub-heading\">Abstract</h3><p>The problem of the performance of a hybrid system in which the number of control objects changes during its operation is considered. Movement is started by one control object (carrier). At some point in time, several moving objects are separated from it and sent to specified terminal states (targets). The carrier is represented by a hybrid model of the Dubins vehicle, allowing trajectories of unlimited curvature. The movement of separated objects is rectilinear with limited speeds and accelerations. The problem of minimizing the time to achieve all targets is solved.</p>","PeriodicalId":50223,"journal":{"name":"Journal of Computer and Systems Sciences International","volume":"25 1","pages":""},"PeriodicalIF":0.5000,"publicationDate":"2024-08-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Researching Performance of the Dubins Vehicle’s Hybrid Model with a Single Separation of the Control Objects\",\"authors\":\"A. S. Bortakovskii, I. V. Uryupin\",\"doi\":\"10.1134/s1064230724700072\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<h3 data-test=\\\"abstract-sub-heading\\\">Abstract</h3><p>The problem of the performance of a hybrid system in which the number of control objects changes during its operation is considered. Movement is started by one control object (carrier). At some point in time, several moving objects are separated from it and sent to specified terminal states (targets). The carrier is represented by a hybrid model of the Dubins vehicle, allowing trajectories of unlimited curvature. The movement of separated objects is rectilinear with limited speeds and accelerations. The problem of minimizing the time to achieve all targets is solved.</p>\",\"PeriodicalId\":50223,\"journal\":{\"name\":\"Journal of Computer and Systems Sciences International\",\"volume\":\"25 1\",\"pages\":\"\"},\"PeriodicalIF\":0.5000,\"publicationDate\":\"2024-08-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Computer and Systems Sciences International\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1134/s1064230724700072\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Computer and Systems Sciences International","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1134/s1064230724700072","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Researching Performance of the Dubins Vehicle’s Hybrid Model with a Single Separation of the Control Objects
Abstract
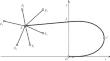
The problem of the performance of a hybrid system in which the number of control objects changes during its operation is considered. Movement is started by one control object (carrier). At some point in time, several moving objects are separated from it and sent to specified terminal states (targets). The carrier is represented by a hybrid model of the Dubins vehicle, allowing trajectories of unlimited curvature. The movement of separated objects is rectilinear with limited speeds and accelerations. The problem of minimizing the time to achieve all targets is solved.
期刊介绍:
Journal of Computer and System Sciences International is a journal published in collaboration with the Russian Academy of Sciences. It covers all areas of control theory and systems. The journal features papers on the theory and methods of control, as well as papers devoted to the study, design, modeling, development, and application of new control systems. The journal publishes papers that reflect contemporary research and development in the field of control. Particular attention is given to applications of computer methods and technologies to control theory and control engineering. The journal publishes proceedings of international scientific conferences in the form of collections of regular journal articles and reviews by top experts on topical problems of modern studies in control theory.


 分享
分享

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
