{"title":"用于感知水生环境的自推进纳米纤维素气凝胶生态机器人","authors":"Jiwei Zhang, Mengjie Wu, Xinran Zhou, Zechang Ming, Jian Chen, Liming Zhu, Jianyong Yu, Zhong Lin Wang, Jiaqing Xiong","doi":"10.1021/acsenergylett.4c01769","DOIUrl":null,"url":null,"abstract":"Untethered robots utilizing environmental energy for aquatic information perception are significant for human–robot–environment interactions, which require strategies to reconcile self-powered locomotion and autonomous sensation. Inspired by rove beetles with Marangoni propulsion, we developed a self-propelled nanocellulose aerogel eco-robot with a parallelly patterned electrode array with equal gaps, demonstrating continuous locomotion on water and simultaneous electricity generation via an unreported continuous solid–liquid sliding contact electrification mechanism with sufficient charge transfer. Systematically studying the charge transfer mechanism between the locomotive robot and water surface at different robot geometry, motion status, and diversified water contamination conditions, the self-powered robot achieves locomotion status self-monitoring and water contaminant concentration detection with a high sensitivity of 99.6%. It also demonstrates water–organism interaction including fish motion perception and monitoring. This work proposes a concept for constructing a smart aquatic ecosystem utilizing robots with self-powered mechanical–electrical cooperativity, demonstrating autonomous environmental energy utilization for information acquisition and interaction.","PeriodicalId":16,"journal":{"name":"ACS Energy Letters ","volume":"30 1","pages":""},"PeriodicalIF":18.2000,"publicationDate":"2024-09-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Self-Propelled Nanocellulose Aerogel Eco-Robots for Self-Powered Aquatic Environment Perception\",\"authors\":\"Jiwei Zhang, Mengjie Wu, Xinran Zhou, Zechang Ming, Jian Chen, Liming Zhu, Jianyong Yu, Zhong Lin Wang, Jiaqing Xiong\",\"doi\":\"10.1021/acsenergylett.4c01769\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Untethered robots utilizing environmental energy for aquatic information perception are significant for human–robot–environment interactions, which require strategies to reconcile self-powered locomotion and autonomous sensation. Inspired by rove beetles with Marangoni propulsion, we developed a self-propelled nanocellulose aerogel eco-robot with a parallelly patterned electrode array with equal gaps, demonstrating continuous locomotion on water and simultaneous electricity generation via an unreported continuous solid–liquid sliding contact electrification mechanism with sufficient charge transfer. Systematically studying the charge transfer mechanism between the locomotive robot and water surface at different robot geometry, motion status, and diversified water contamination conditions, the self-powered robot achieves locomotion status self-monitoring and water contaminant concentration detection with a high sensitivity of 99.6%. It also demonstrates water–organism interaction including fish motion perception and monitoring. This work proposes a concept for constructing a smart aquatic ecosystem utilizing robots with self-powered mechanical–electrical cooperativity, demonstrating autonomous environmental energy utilization for information acquisition and interaction.\",\"PeriodicalId\":16,\"journal\":{\"name\":\"ACS Energy Letters \",\"volume\":\"30 1\",\"pages\":\"\"},\"PeriodicalIF\":18.2000,\"publicationDate\":\"2024-09-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ACS Energy Letters \",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://doi.org/10.1021/acsenergylett.4c01769\",\"RegionNum\":1,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"CHEMISTRY, PHYSICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ACS Energy Letters ","FirstCategoryId":"88","ListUrlMain":"https://doi.org/10.1021/acsenergylett.4c01769","RegionNum":1,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
Self-Propelled Nanocellulose Aerogel Eco-Robots for Self-Powered Aquatic Environment Perception
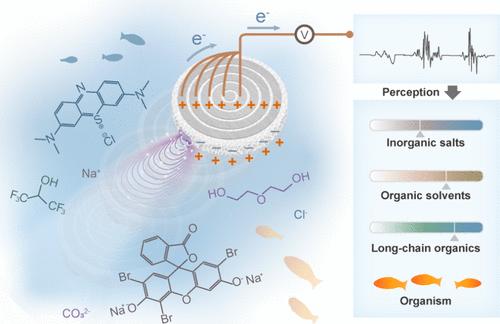
Untethered robots utilizing environmental energy for aquatic information perception are significant for human–robot–environment interactions, which require strategies to reconcile self-powered locomotion and autonomous sensation. Inspired by rove beetles with Marangoni propulsion, we developed a self-propelled nanocellulose aerogel eco-robot with a parallelly patterned electrode array with equal gaps, demonstrating continuous locomotion on water and simultaneous electricity generation via an unreported continuous solid–liquid sliding contact electrification mechanism with sufficient charge transfer. Systematically studying the charge transfer mechanism between the locomotive robot and water surface at different robot geometry, motion status, and diversified water contamination conditions, the self-powered robot achieves locomotion status self-monitoring and water contaminant concentration detection with a high sensitivity of 99.6%. It also demonstrates water–organism interaction including fish motion perception and monitoring. This work proposes a concept for constructing a smart aquatic ecosystem utilizing robots with self-powered mechanical–electrical cooperativity, demonstrating autonomous environmental energy utilization for information acquisition and interaction.
ACS Energy Letters Energy-Renewable Energy, Sustainability and the Environment
CiteScore
31.20
自引率
5.00%
发文量
469
审稿时长
1 months
期刊介绍:
ACS Energy Letters is a monthly journal that publishes papers reporting new scientific advances in energy research. The journal focuses on topics that are of interest to scientists working in the fundamental and applied sciences. Rapid publication is a central criterion for acceptance, and the journal is known for its quick publication times, with an average of 4-6 weeks from submission to web publication in As Soon As Publishable format.
ACS Energy Letters is ranked as the number one journal in the Web of Science Electrochemistry category. It also ranks within the top 10 journals for Physical Chemistry, Energy & Fuels, and Nanoscience & Nanotechnology.
The journal offers several types of articles, including Letters, Energy Express, Perspectives, Reviews, Editorials, Viewpoints and Energy Focus. Additionally, authors have the option to submit videos that summarize or support the information presented in a Perspective or Review article, which can be highlighted on the journal's website. ACS Energy Letters is abstracted and indexed in Chemical Abstracts Service/SciFinder, EBSCO-summon, PubMed, Web of Science, Scopus and Portico.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
