Diego Fernández-Zapico, Thijs Peirelinck, Geert Deconinck, Dirk W. Donker, Libera Fresiello
{"title":"基于深度强化学习的左心室辅助设备生理控制","authors":"Diego Fernández-Zapico, Thijs Peirelinck, Geert Deconinck, Dirk W. Donker, Libera Fresiello","doi":"10.1111/aor.14845","DOIUrl":null,"url":null,"abstract":"<div>\n \n \n <section>\n \n <h3> Background</h3>\n \n <p>The improvement of controllers of left ventricular assist device (LVAD) technology supporting heart failure (HF) patients has enormous impact, given the high prevalence and mortality of HF in the population. The use of reinforcement learning for control applications in LVAD remains minimally explored. This work introduces a preload-based deep reinforcement learning control for LVAD based on the proximal policy optimization algorithm.</p>\n </section>\n \n <section>\n \n <h3> Methods</h3>\n \n <p>The deep reinforcement learning control is built upon data derived from a deterministic high-fidelity cardiorespiratory simulator exposed to variations of total blood volume, heart rate, systemic vascular resistance, pulmonary vascular resistance, right ventricular end-systolic elastance, and left ventricular end-systolic elastance, to replicate realistic inter- and intra-patient variability of patients with a severe HF supported by LVAD. The deep reinforcement learning control obtained in this work is trained to avoid ventricular suction and allow aortic valve opening by using left ventricular pressure signals: end-diastolic pressure, maximum pressure in the left ventricle (LV), and maximum pressure in the aorta.</p>\n </section>\n \n <section>\n \n <h3> Results</h3>\n \n <p>The results show controller obtained in this work, compared to the constant speed LVAD alternative, assures a more stable end-diastolic volume (<i>EDV</i>), with a standard deviation of 5 mL and 9 mL, respectively, and a higher degree of aortic flow, with an average flow of 1.1 L/min and 0.9 L/min, respectively.</p>\n </section>\n \n <section>\n \n <h3> Conclusion</h3>\n \n <p>This work implements a deep reinforcement learning controller in a high-fidelity cardiorespiratory simulator, resulting in increases of flow through the aortic valve and increases of <i>EDV</i> stability, when compared to a constant speed LVAD strategy.</p>\n </section>\n </div>","PeriodicalId":8450,"journal":{"name":"Artificial organs","volume":"48 12","pages":"1418-1429"},"PeriodicalIF":2.3000,"publicationDate":"2024-09-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Physiological control for left ventricular assist devices based on deep reinforcement learning\",\"authors\":\"Diego Fernández-Zapico, Thijs Peirelinck, Geert Deconinck, Dirk W. Donker, Libera Fresiello\",\"doi\":\"10.1111/aor.14845\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n \\n <section>\\n \\n <h3> Background</h3>\\n \\n <p>The improvement of controllers of left ventricular assist device (LVAD) technology supporting heart failure (HF) patients has enormous impact, given the high prevalence and mortality of HF in the population. The use of reinforcement learning for control applications in LVAD remains minimally explored. This work introduces a preload-based deep reinforcement learning control for LVAD based on the proximal policy optimization algorithm.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Methods</h3>\\n \\n <p>The deep reinforcement learning control is built upon data derived from a deterministic high-fidelity cardiorespiratory simulator exposed to variations of total blood volume, heart rate, systemic vascular resistance, pulmonary vascular resistance, right ventricular end-systolic elastance, and left ventricular end-systolic elastance, to replicate realistic inter- and intra-patient variability of patients with a severe HF supported by LVAD. The deep reinforcement learning control obtained in this work is trained to avoid ventricular suction and allow aortic valve opening by using left ventricular pressure signals: end-diastolic pressure, maximum pressure in the left ventricle (LV), and maximum pressure in the aorta.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Results</h3>\\n \\n <p>The results show controller obtained in this work, compared to the constant speed LVAD alternative, assures a more stable end-diastolic volume (<i>EDV</i>), with a standard deviation of 5 mL and 9 mL, respectively, and a higher degree of aortic flow, with an average flow of 1.1 L/min and 0.9 L/min, respectively.</p>\\n </section>\\n \\n <section>\\n \\n <h3> Conclusion</h3>\\n \\n <p>This work implements a deep reinforcement learning controller in a high-fidelity cardiorespiratory simulator, resulting in increases of flow through the aortic valve and increases of <i>EDV</i> stability, when compared to a constant speed LVAD strategy.</p>\\n </section>\\n </div>\",\"PeriodicalId\":8450,\"journal\":{\"name\":\"Artificial organs\",\"volume\":\"48 12\",\"pages\":\"1418-1429\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2024-09-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Artificial organs\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1111/aor.14845\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Artificial organs","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1111/aor.14845","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Physiological control for left ventricular assist devices based on deep reinforcement learning
Background
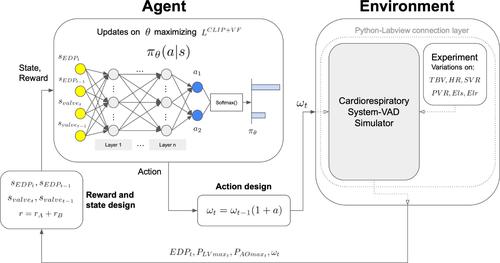
The improvement of controllers of left ventricular assist device (LVAD) technology supporting heart failure (HF) patients has enormous impact, given the high prevalence and mortality of HF in the population. The use of reinforcement learning for control applications in LVAD remains minimally explored. This work introduces a preload-based deep reinforcement learning control for LVAD based on the proximal policy optimization algorithm.
Methods
The deep reinforcement learning control is built upon data derived from a deterministic high-fidelity cardiorespiratory simulator exposed to variations of total blood volume, heart rate, systemic vascular resistance, pulmonary vascular resistance, right ventricular end-systolic elastance, and left ventricular end-systolic elastance, to replicate realistic inter- and intra-patient variability of patients with a severe HF supported by LVAD. The deep reinforcement learning control obtained in this work is trained to avoid ventricular suction and allow aortic valve opening by using left ventricular pressure signals: end-diastolic pressure, maximum pressure in the left ventricle (LV), and maximum pressure in the aorta.
Results
The results show controller obtained in this work, compared to the constant speed LVAD alternative, assures a more stable end-diastolic volume (EDV), with a standard deviation of 5 mL and 9 mL, respectively, and a higher degree of aortic flow, with an average flow of 1.1 L/min and 0.9 L/min, respectively.
Conclusion
This work implements a deep reinforcement learning controller in a high-fidelity cardiorespiratory simulator, resulting in increases of flow through the aortic valve and increases of EDV stability, when compared to a constant speed LVAD strategy.
期刊介绍:
Artificial Organs is the official peer reviewed journal of The International Federation for Artificial Organs (Members of the Federation are: The American Society for Artificial Internal Organs, The European Society for Artificial Organs, and The Japanese Society for Artificial Organs), The International Faculty for Artificial Organs, the International Society for Rotary Blood Pumps, The International Society for Pediatric Mechanical Cardiopulmonary Support, and the Vienna International Workshop on Functional Electrical Stimulation. Artificial Organs publishes original research articles dealing with developments in artificial organs applications and treatment modalities and their clinical applications worldwide. Membership in the Societies listed above is not a prerequisite for publication. Articles are published without charge to the author except for color figures and excess page charges as noted.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
