{"title":"电介质致动器的非线性动力学:探索电极力学","authors":"Rashi Aditi Ranjan , Somnath Sarangi , Ranjan Bhattacharyya","doi":"10.1016/j.ijmecsci.2024.109755","DOIUrl":null,"url":null,"abstract":"<div><div>Dielectric elastomer (DE) is a smart material with various biomedical, soft robotics, and vibration control applications. Modeling of the DE actuator is essential for its practical applicability by virtue of its nonlinear characteristic. Many existing models neglect the effect of the electrode despite substantial experimental work demonstrating the electrode’s influence. This work presents the model and nonlinear analysis of the equi-biaxial motion of a planar dielectric membrane incorporating the effect of the electrode. The uniqueness of the paper is due to the inclusion of terms related to inertia, stiffness and damping of the electrode in the governing equation. The elastomer and the electrode are both assumed to be hyperelastic materials having different physical properties, and the governing equation is derived by considering the mechanical aspects of both the elastomer and electrode materials. The behavior of the system for both constant and time-varying voltages is analyzed. Static response and its dependence are explored by presenting the equilibrium stretch plot, potential energy characteristics, and the basin of attraction. The analysis is further expanded for the time-varying voltage, and the impact of the electrode material on the system’s stretch range is also demonstrated. Backward and forward frequency sweeps are used to obtain the amplitude–frequency response and show its dependence on the electrode. Furthermore, time response, phase plot, Poincare map, and Lyapunov exponent are utilized to demonstrate the impact of the mechanical characteristic of the elastomer and electrode on the overall dynamics. The proposed model is validated with the experiment for different voltage conditions. A comparison is also presented between the experiment and system behavior with and without the electrode effect. The findings indicate that the electrode influences the static and dynamic response of the actuator. This work gives a more realistic model of the DE actuator and guides more accurate design of the actuator for various applications.</div></div>","PeriodicalId":56287,"journal":{"name":"International Journal of Mechanical Sciences","volume":"283 ","pages":"Article 109755"},"PeriodicalIF":9.4000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Nonlinear dynamics of dielectric actuator: Exploring electrode mechanics\",\"authors\":\"Rashi Aditi Ranjan , Somnath Sarangi , Ranjan Bhattacharyya\",\"doi\":\"10.1016/j.ijmecsci.2024.109755\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>Dielectric elastomer (DE) is a smart material with various biomedical, soft robotics, and vibration control applications. Modeling of the DE actuator is essential for its practical applicability by virtue of its nonlinear characteristic. Many existing models neglect the effect of the electrode despite substantial experimental work demonstrating the electrode’s influence. This work presents the model and nonlinear analysis of the equi-biaxial motion of a planar dielectric membrane incorporating the effect of the electrode. The uniqueness of the paper is due to the inclusion of terms related to inertia, stiffness and damping of the electrode in the governing equation. The elastomer and the electrode are both assumed to be hyperelastic materials having different physical properties, and the governing equation is derived by considering the mechanical aspects of both the elastomer and electrode materials. The behavior of the system for both constant and time-varying voltages is analyzed. Static response and its dependence are explored by presenting the equilibrium stretch plot, potential energy characteristics, and the basin of attraction. The analysis is further expanded for the time-varying voltage, and the impact of the electrode material on the system’s stretch range is also demonstrated. Backward and forward frequency sweeps are used to obtain the amplitude–frequency response and show its dependence on the electrode. Furthermore, time response, phase plot, Poincare map, and Lyapunov exponent are utilized to demonstrate the impact of the mechanical characteristic of the elastomer and electrode on the overall dynamics. The proposed model is validated with the experiment for different voltage conditions. A comparison is also presented between the experiment and system behavior with and without the electrode effect. The findings indicate that the electrode influences the static and dynamic response of the actuator. This work gives a more realistic model of the DE actuator and guides more accurate design of the actuator for various applications.</div></div>\",\"PeriodicalId\":56287,\"journal\":{\"name\":\"International Journal of Mechanical Sciences\",\"volume\":\"283 \",\"pages\":\"Article 109755\"},\"PeriodicalIF\":9.4000,\"publicationDate\":\"2024-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Mechanical Sciences\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S0020740324007963\",\"RegionNum\":1,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/9/28 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical Sciences","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0020740324007963","RegionNum":1,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/9/28 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
摘要
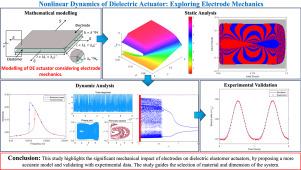
介电弹性体(DE)是一种智能材料,在生物医学、软机器人和振动控制等领域有着广泛的应用。由于其非线性特性,电介质致动器的建模对其实际应用至关重要。尽管大量实验证明了电极的影响,但许多现有模型都忽略了电极的影响。本文介绍了包含电极效应的平面介电膜等轴向运动模型和非线性分析。本文的独特之处在于将与电极的惯性、刚度和阻尼有关的项纳入了控制方程。假设弹性体和电极都是具有不同物理性质的超弹性材料,并通过考虑弹性体和电极材料的机械特性推导出控制方程。分析了恒定电压和时变电压下的系统行为。通过展示平衡拉伸图、势能特征和吸引力盆地,探讨了静态响应及其依赖性。针对时变电压的分析得到了进一步扩展,同时还展示了电极材料对系统拉伸范围的影响。利用后向和前向频率扫描获得幅频响应,并显示其与电极的关系。此外,还利用时间响应、相位图、Poincare 地图和 Lyapunov 指数来证明弹性体和电极的机械特性对整体动力学的影响。提出的模型与不同电压条件下的实验进行了验证。此外,还对实验结果和有无电极效应的系统行为进行了比较。研究结果表明,电极会影响致动器的静态和动态响应。这项研究为 DE 激励器提供了一个更真实的模型,并为各种应用提供了更精确的激励器设计指导。
Nonlinear dynamics of dielectric actuator: Exploring electrode mechanics
Dielectric elastomer (DE) is a smart material with various biomedical, soft robotics, and vibration control applications. Modeling of the DE actuator is essential for its practical applicability by virtue of its nonlinear characteristic. Many existing models neglect the effect of the electrode despite substantial experimental work demonstrating the electrode’s influence. This work presents the model and nonlinear analysis of the equi-biaxial motion of a planar dielectric membrane incorporating the effect of the electrode. The uniqueness of the paper is due to the inclusion of terms related to inertia, stiffness and damping of the electrode in the governing equation. The elastomer and the electrode are both assumed to be hyperelastic materials having different physical properties, and the governing equation is derived by considering the mechanical aspects of both the elastomer and electrode materials. The behavior of the system for both constant and time-varying voltages is analyzed. Static response and its dependence are explored by presenting the equilibrium stretch plot, potential energy characteristics, and the basin of attraction. The analysis is further expanded for the time-varying voltage, and the impact of the electrode material on the system’s stretch range is also demonstrated. Backward and forward frequency sweeps are used to obtain the amplitude–frequency response and show its dependence on the electrode. Furthermore, time response, phase plot, Poincare map, and Lyapunov exponent are utilized to demonstrate the impact of the mechanical characteristic of the elastomer and electrode on the overall dynamics. The proposed model is validated with the experiment for different voltage conditions. A comparison is also presented between the experiment and system behavior with and without the electrode effect. The findings indicate that the electrode influences the static and dynamic response of the actuator. This work gives a more realistic model of the DE actuator and guides more accurate design of the actuator for various applications.
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.



 分享
分享
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式: 扫码关注我们
扫码关注我们
